


Сборка квадрокоптера на раме RC180 V2 (часть 3) - смена рамы

Мир вокруг пестрит парадоксами и вот один из них: на квадрокоптере не летаю, но раму сломать умудрился. На большой скорости под углом градусов в 45 приложился о каменную стену. Немного погнулась передняя правая стойка и сломалась передняя верхняя пластина. На камере ни царапины, а значит монтаж её в глубине корпуса оправдан. Также при дальнейшем рассмотрении выяснилось, что карбон задней вехней пластины расслоился без видимых причин. Вывод очевиден - качество карбона у рамы RC180 V2 плохое. Деталей, да и самой рамы в продаже уже нет, значит надо менять на какую-то другую.
Во многих аспектах, данная статья выражает субъективное мнение автора. Это мой путь и мои грабли. По мере "просветления" автора, статья будет дополняться/исправляться.
Больше года прошло с момента заказа комплектующих для этого квадрокоптера. С тех пор кое-что в этой индустрии изменилось. Помимо эволюционных изменений, вроде протокола DShot и процессоров F7, есть и не настолько очевидно полезные, вызванные, скорее, маркетинговыми соображениями производителей комплектующих. Например, полный уход от "трамвайных" (H-образных) рам к "крестам" (X-образные). Непосредственно в сборке тенденции тоже сменились. Сейчас приветствуется виброразвязка всего чего только можно и "чистое" питание без помех. Последнее достигается за счёт использования конденсаторов (подробнее).
Выбор рамы
Начав искать новую раму, столкнулся с предсказуемой проблемой. Я уже писал, что 180-й размер - непонятный полумер. Как следствие, сейчас таких рам почти нет (нашёл всего три варианта). Кроме того, приличные рамы стоят сейчас 50-60 €. В итоге, самый лучший для себя вариант увидел здесь - крестовина от популярной рамы RealAcc X210 и отдельная канопа/кабина для QAV-X. Размер при этом изменится с 180 до 210, но можно будет использовать 5-дюймовые пропеллеры, коих у меня с избытком. Позднее, когда сборка уже велась, у RealAcc появилось две занятные рамы: очень привлекательная RealAcc Stan200 и более сомнительная RealAcc XS220E.
Помимо рамы, изменений немного: добавилось виброразвязка ПК от RealAcc, приёмник был заменён на Flysky FS-A8S (с переходом на S.Bus), а подсветка была удалена за ненадобностью. Также использовал конденсатор Panasonic 1000uF*25V, для "очистки" питания.
Сборка
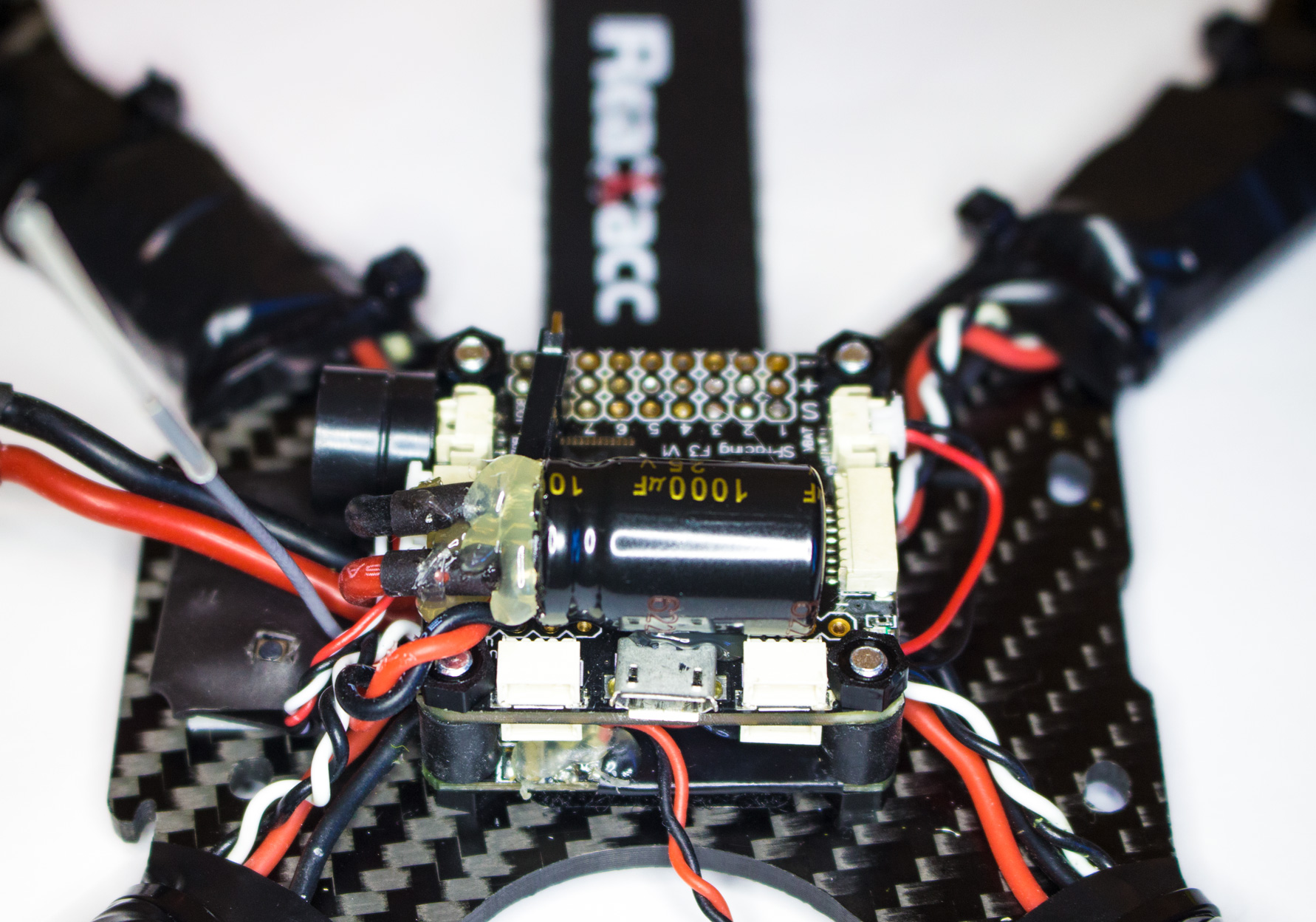
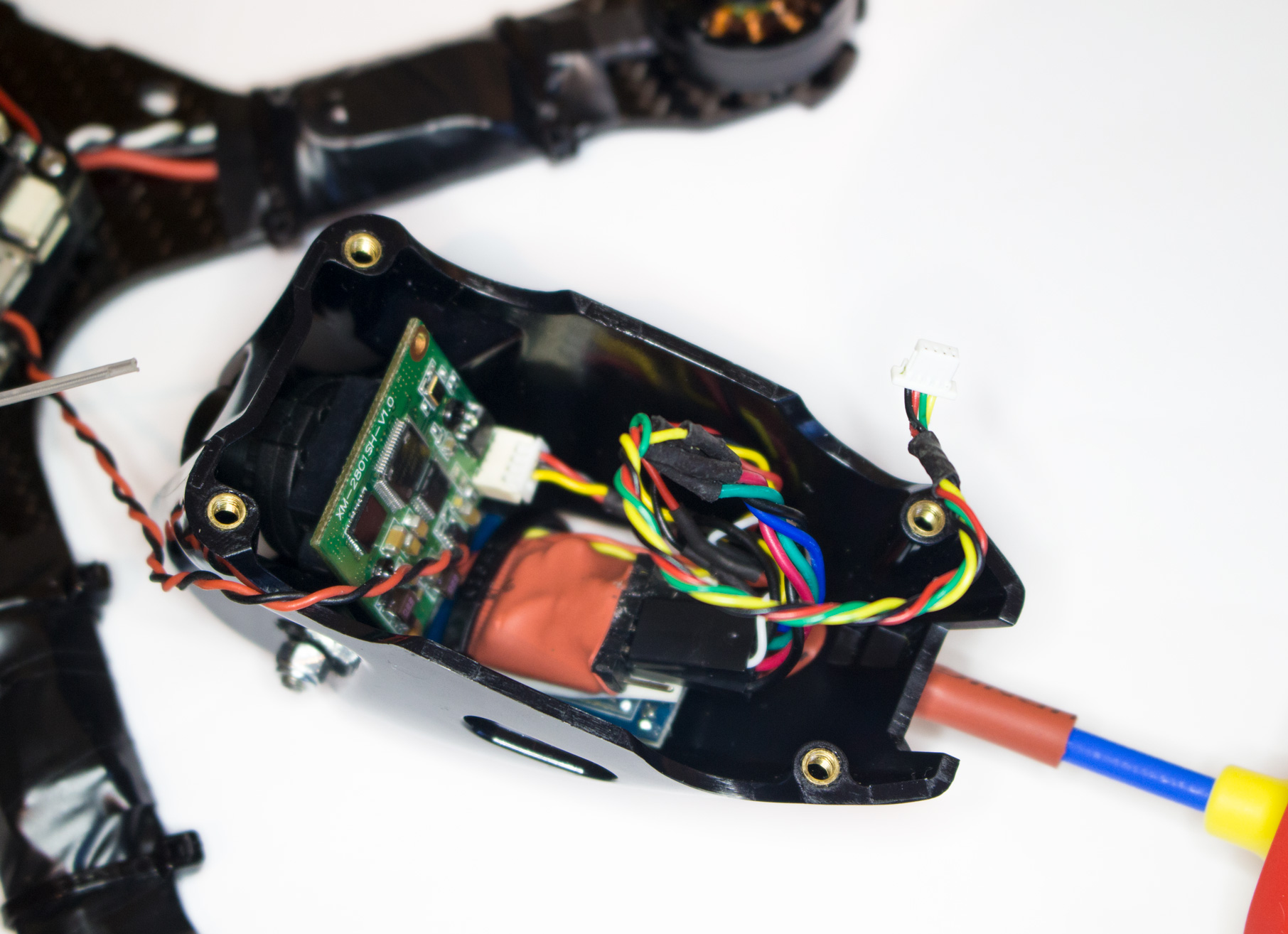
Компактность верхней кабины задала мне челлендж нового уровня. В общем и целом сборка заняла 10-12 часов (подготовительные работы + 3 вечера). Спустя несколько попыток, компоновка выглядела так: камера и видеопередатчик расположились в верхней кабине; PDB, ПК и приёмник - на крестовине рамы, причём приёмник оказался сзади под силовыми проводами. Плате OSD места не нашлось, пришлось попрощаться с ней. Также пришлось избавиться и от разъёмов для подключения регуляторов к ПК. Вместо этого припаял провода напрямую, причём с нижней стороны. "Пищалку" тоже припаял напрямую к ПК. Конденсатор приклеил к ПК термоклеем. Им же залил почти все места пайки проводов к платам. Антенну приёмника закрепил термоусадкой на стяжке, которая фиксирует антенну видеопередатчика. Получилось, что обе антенны держатся одной стяжкой.
-
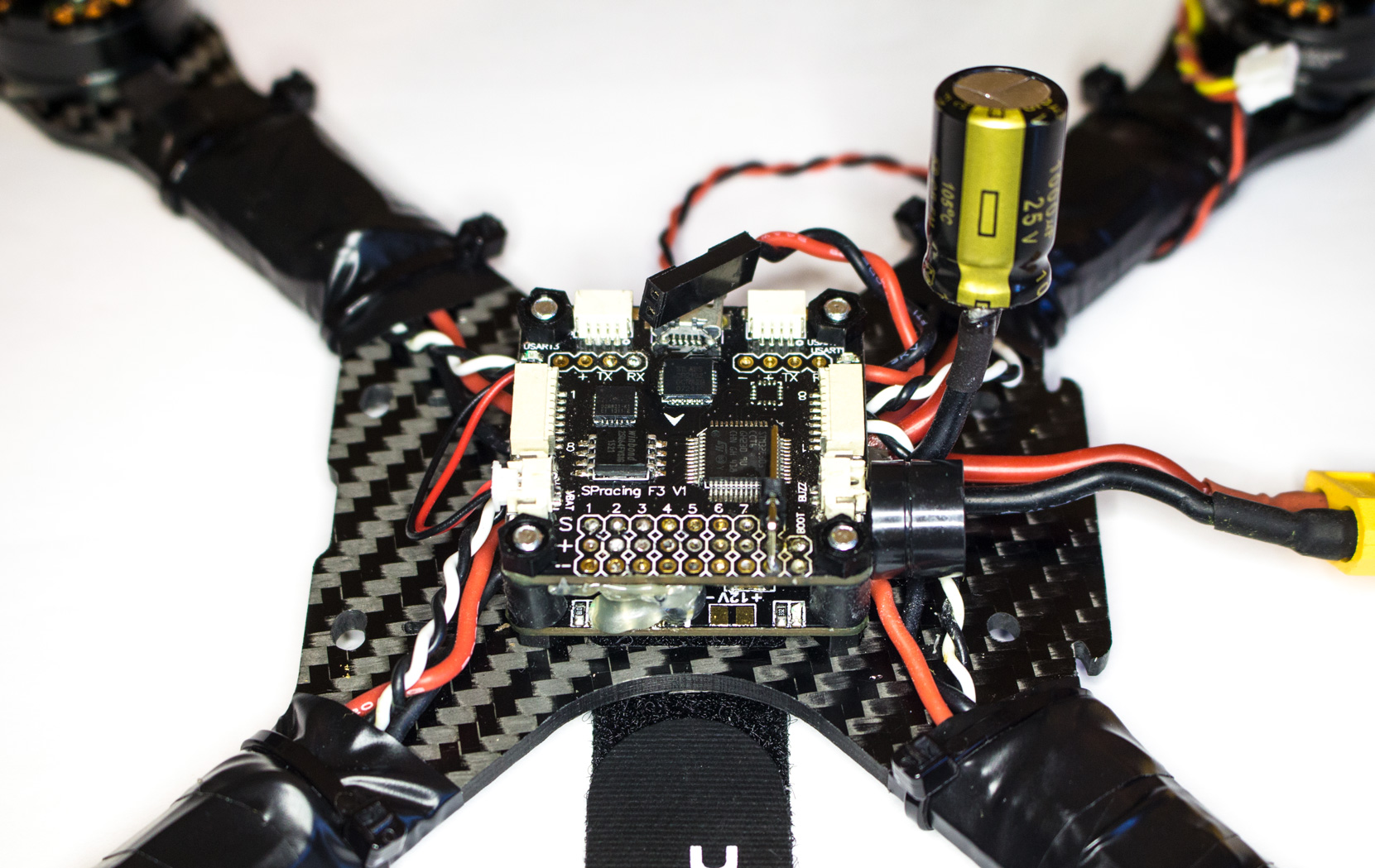
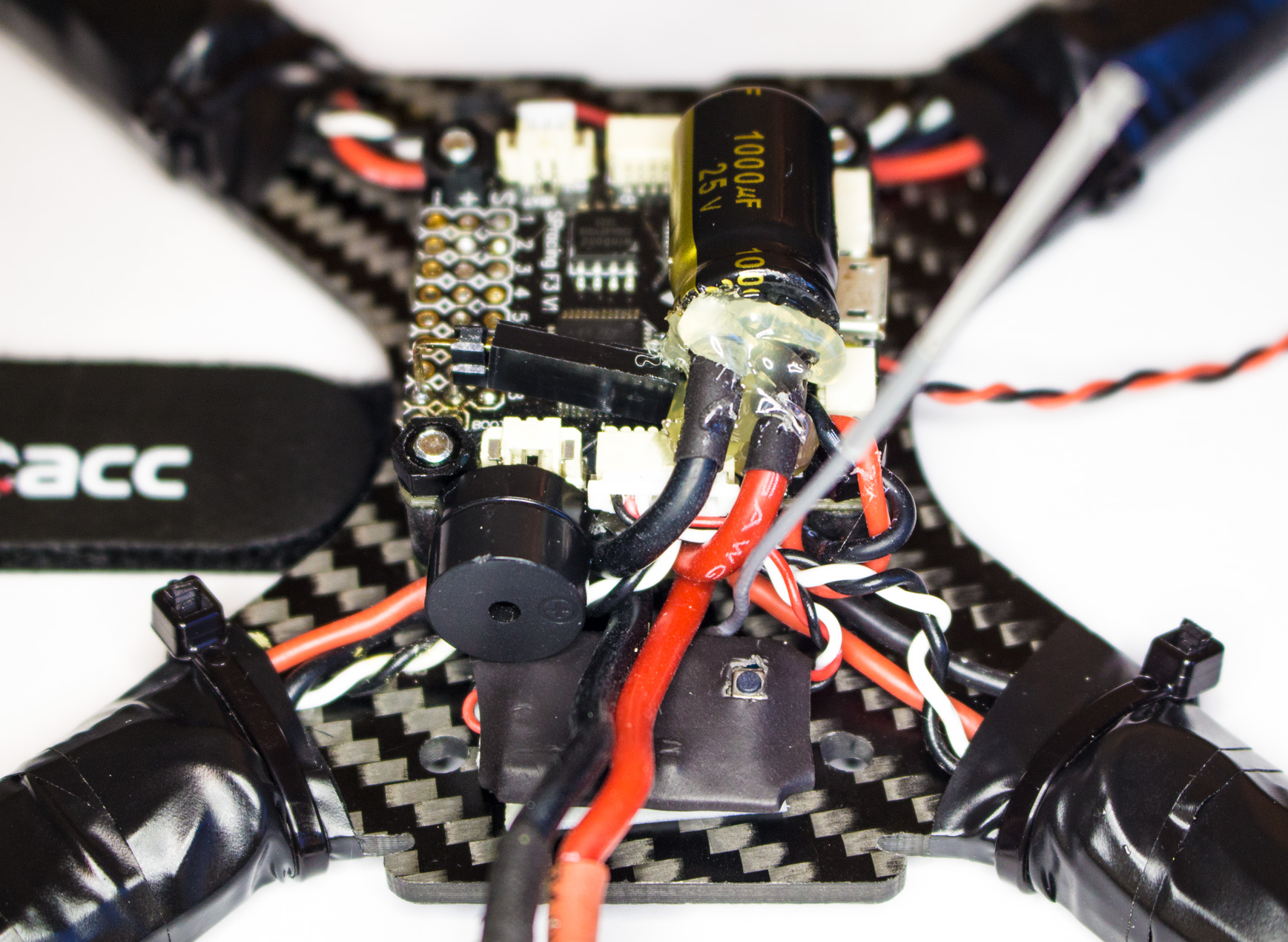
 "Пищалка", припаянная к ПК, и конденсатор.
"Пищалка", припаянная к ПК, и конденсатор. -
 Расположение приёмника.
Расположение приёмника. -
-
 "Не поместившаяся" Micro MinimOSD.
"Не поместившаяся" Micro MinimOSD.
Защиту батареи сделал, как у RealAcc X210, благо все детали для этой рамы можно купить по-отдельности. Также сделал защиту регуляторов. Можно купить готовую, а можно сколхозить из подручных материалов. Она должна закрывать регуляторы, спасая их от погнувшихся лопастей. Это может быть что угодно. Видел, что кто-то даже лопасти от старых пропеллеров для этого использовал. Желательно, чтобы это "что угодно" было скруглённым. Я нарезал кусочков от пластикового бордюра для кафеля и примотал изолентой.
Когда сборка была закончена, заметил, что разъём USB не совсем совпадает с вырезом в кабине, пришлось поработать надвелем.




Настройка
При настройке трудностей было две: привязка приёмника к передатчику и активация протокола S.Bus. Для последнего надо было всего лишь включить Serial RX на порту UART3 (контроллер SPRacingF3). А инструкцию по биндингу Flysky FS-A8S с Turnigy Evolution пришлось искать. Оказывается, последовательность действий такова:
- Через меню активируем бинд в Turnigy Evolution
- Зажав кнопку бинда, подаём питание на приёмник (после этого кнопку можно отпустить). Светодиод на нём должен моргать красным
- Подождав пару секунд, выключаем передатчик (из меню бинда выходить не надо!)
- Включаем передатчик. Если светодиод на приёмнике начал гореть без моргания, процесс прошёл успешно
Также в последний момент я решил реализовать ещё один новый тренд - вращение пропеллеров в обратном направлении. Классически 1-й и 4-й моторы (согласно нумерации Cleanflight/Betaflight) вращаются по часовой стрелке, а 2-й и 3-й - против часовой. Сейчас есть тенденция делать наоборот. Подробно обо всех плюсах такого изменения рассказано в этом видео. Если кратко и на русском, то улучшается аэродинамика и поведение при поворотах по Yaw, а также камера меньше загрязнается.
Что надо сделать? Поменять через "BLHeli Configurator" или "BLHeli Suite" направление вращения всех моторов на противоположное, переставить пропеллеры, а также прописать в CLI реверсивную обработку поворотов по Yaw:
set yaw_motor_direction = -1
На этом всё, теперь полёты. Кстати, квадрокоптер полегчал на 35 грамм: 290г (без батареи) против 330г на старой раме.


Не накомментили ещё. Би зэ фёст!