


Сборка квадрокоптера на раме RoboCat (часть 2) - сборка

- Часть 1 - комплектующие
- Часть 3 - пересборка на SPRacingF3
- Часть 4 - установка и наcтройка iNAV
- Часть 5 - выдержки из бортового журнала
- Фотогалерея
Продолжаем кудесничать. Перед началом сборки надо продумать схему проводки и расположение деталей, а также сделать некоторую подготовительную работу.
Во многих аспектах, данная статья выражает
субъективное мнение автора.
Спорить с ним бесполезно, он упёртый.
Схема проводки
Понятное дело, что все компоненты, которым нужно питание 5В или 12В, будут получать его от BEC`ов платы распределения питания. Камеру теоретически можно было запитать напрямую от 4S-батареи, благо входное напряжение это позволяет, но ни в коем случае делать этого не стоит. Во-первых, все камеры очень восприимчивы к шумам в цепи от регуляторов, что выразится в помехах на картинке. Во-вторых, регуляторы с активным торможением (такие, как мои Little Bee), при активизации этого торможения, дают в бортовую сеть очень серьёзный импульс, что может сжечь камеру. Причём, наличие импульса напрямую зависит от износа батареи. У новых его нет, а у старых - есть. Вот познавательное видео на тему помех от регуляторов и чем их фильтровать. Так что камеру я тоже запитаю от 12В BEC`а, который вдобавок выполняет роль фильтра.
Также, ради улучшения качества картинки, рекомендуется пустить с камеры на OSD не только сигнальный провод, но и "землю". Если скрутить эти провода в "косичку", то "земля" действует, как экран для сигнального провода.
Коли уж зашла речь о "земле", то часто спорят о том, надо ли подключать "землю" от регуляторов к ПК или достаточно одного сигнального провода. На обычном гоночном квадрокоптере однозначно надо подключать. Её отсутствие может привести к срывам синхронизации (подтверждение). В моём случае всё сложнее, так как на ПК находится магнитометр (компас), на который наводки от "земли" регуляторов будут влиять. Тем не менее, выбирая из двух зол, я решил, что управляемость и отзывчивость квадрокоптера важнее и подключил "минус" к ПК.
Следующий момент - показания вольтажа батареи (vbat). Их можно считывать как на OSD, так и на ПК, подключив батарею либо к одному, либо к другому. В чём разница? В первом случае показания будут присутствовать только на экране монитора или очков и ПК ничего не будет о них знать. Во втором случае ПК может отслеживать напряжение батареи, информировать о нём пилота (например, пищалкой), а также передавать эти данные на OSD, в "чёрный ящик" и по телеметрии на пульт. Настраивать точность показаний тоже проще через ПК. То есть, подключение vbat к полётному контроллеру намного предпочтительнее.
Ещё один нюанс, связанный с OSD. Подключить OSD к Naze32 можно через разъём UART1, либо через 3 и 4 каналы (5 и 6 контакты) разъёма приёмника в режиме UART2. UART2, в моём случае, уже будет занят модулем GPS, так что остаётся только UART1, который, кстати, запараллелен с USB. То есть, при настройке ПК через USB, плату OSD надо отключать. Я выбрал один из самых простых способов - JST-разъём на проводе, идущем от OSD к ПК.
В итоге у меня вырисовалась такая схема:
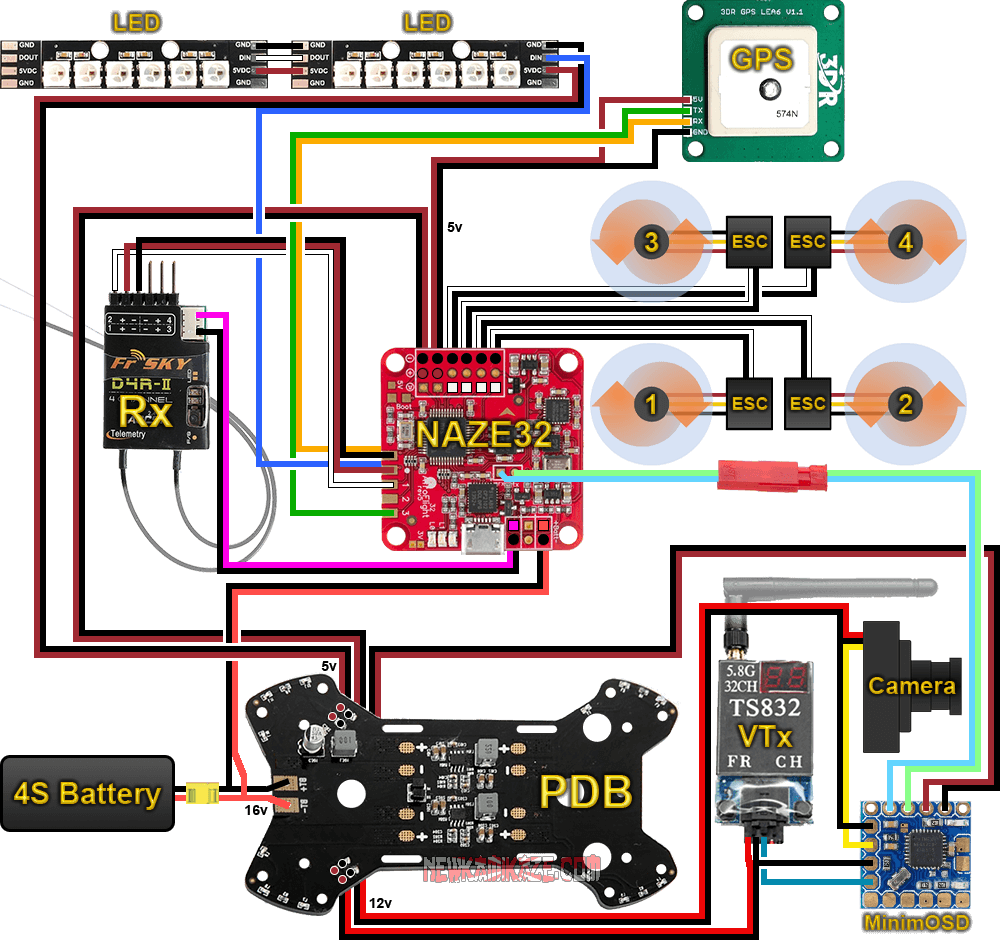
Схема проводки квадрокоптера
У меня уже давно лежит без дела Bluetooth-модуль. Актуальный вопрос: нужен ли он вообще, если можно настраивать ПК через OSD. Я пока решил его не ставить, но вкратце расскажу о подключении. К Naze32 его можно подключить к разъёмам UART или SOFTSERIAL. UART1 у меня уже занят OSD-платой, а UART2 - GPS. В некоторых случаях допускается параллельное подключение Bluetooth и OSD. Согласно тому, что пишут на форумах, это зависит в первую очередь от OSD. Если она использует протоколы LTM или MAVLink, то проблем быть не должно, если ScarabOSD - будет конфликт. MinimOSD работает по протоколу MSP и в этом случае однозначного ответа нет - как повезёт. Есть опасность спалить Bluetooth или OSD, но ситуацию могут спасти резисторы на 220 Ом (в цепь TX OSD или Bluetooth до соединения).
Второй вариант подключения - SOFTSERIAL. В этом случае Bluetooth подключается к 7 и 8 (SOFTSERIAL1) или 9 и 10 (SOFTSERIAL2) контактам разъёма приёмника + отдельно подаётся питание. Подробнее о настройках этого варианта написано здесь.
Компоновка
Как я уже писал, рама RoboCat понравилась мне наличием аж трёх уровней для размещения деталей (плюс ещё один для батареи). В итоге, есть где разгуляться и проявить фантазию и креативность. Для себя я выбрал такой вариант:
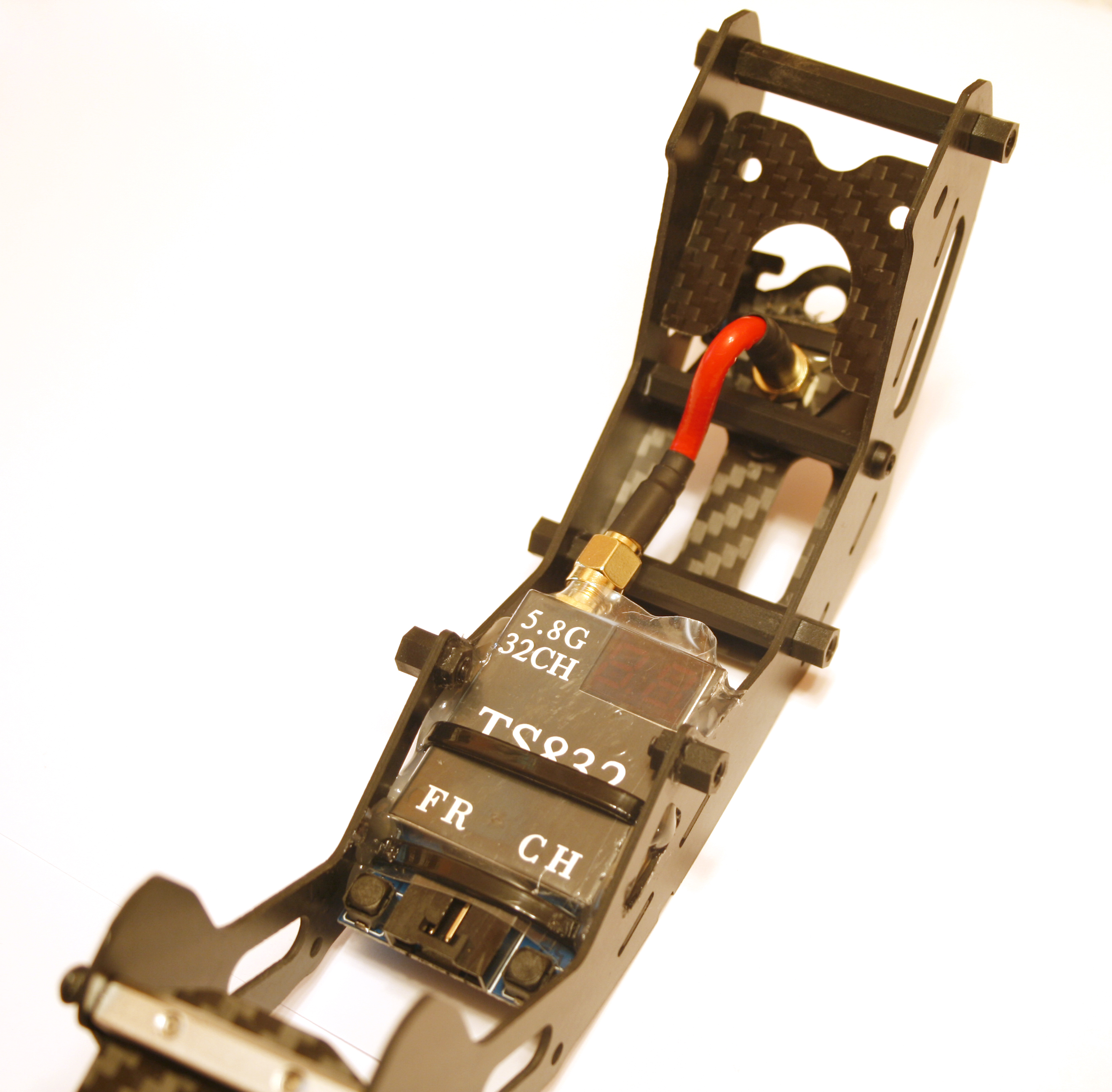
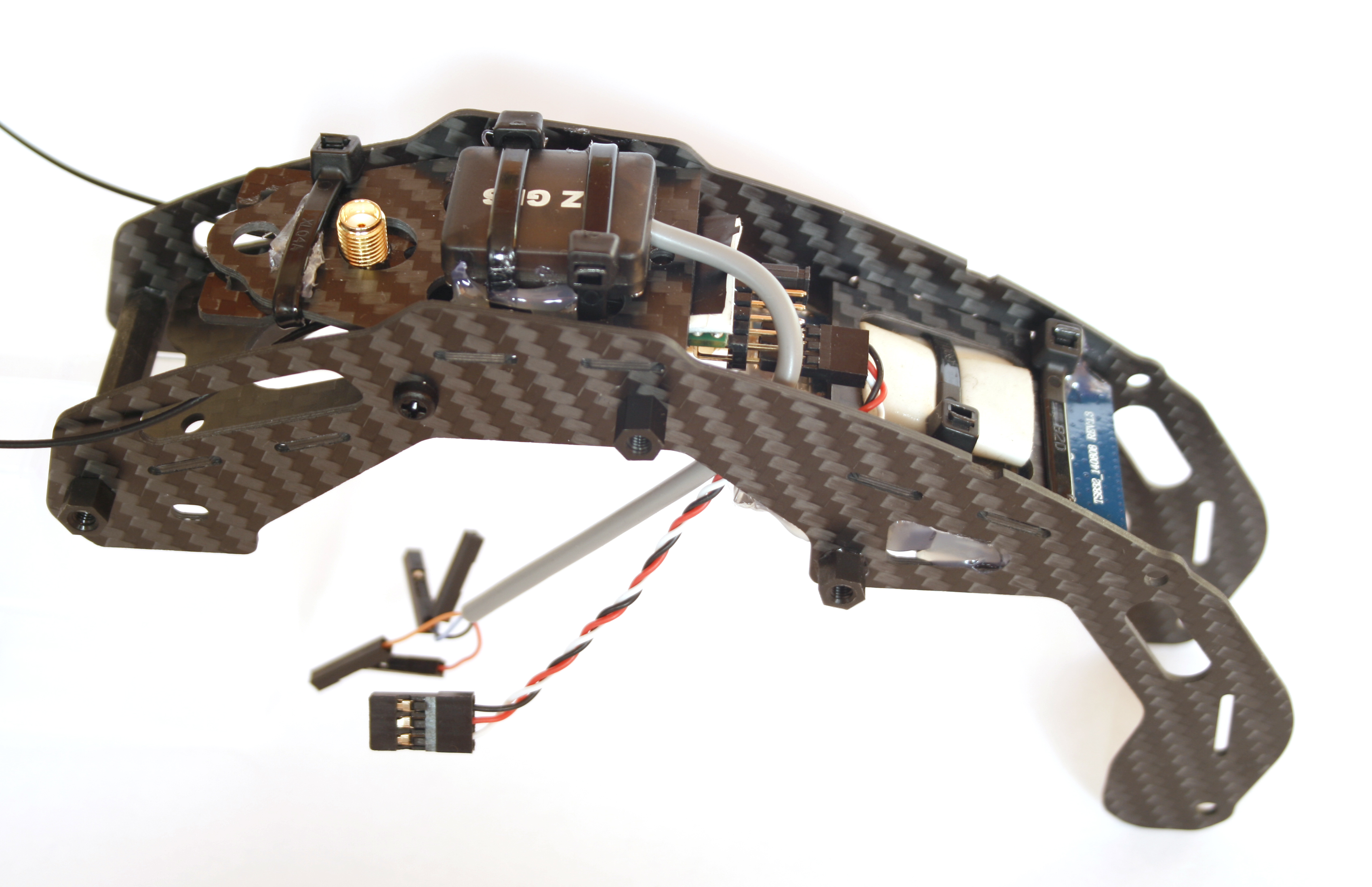
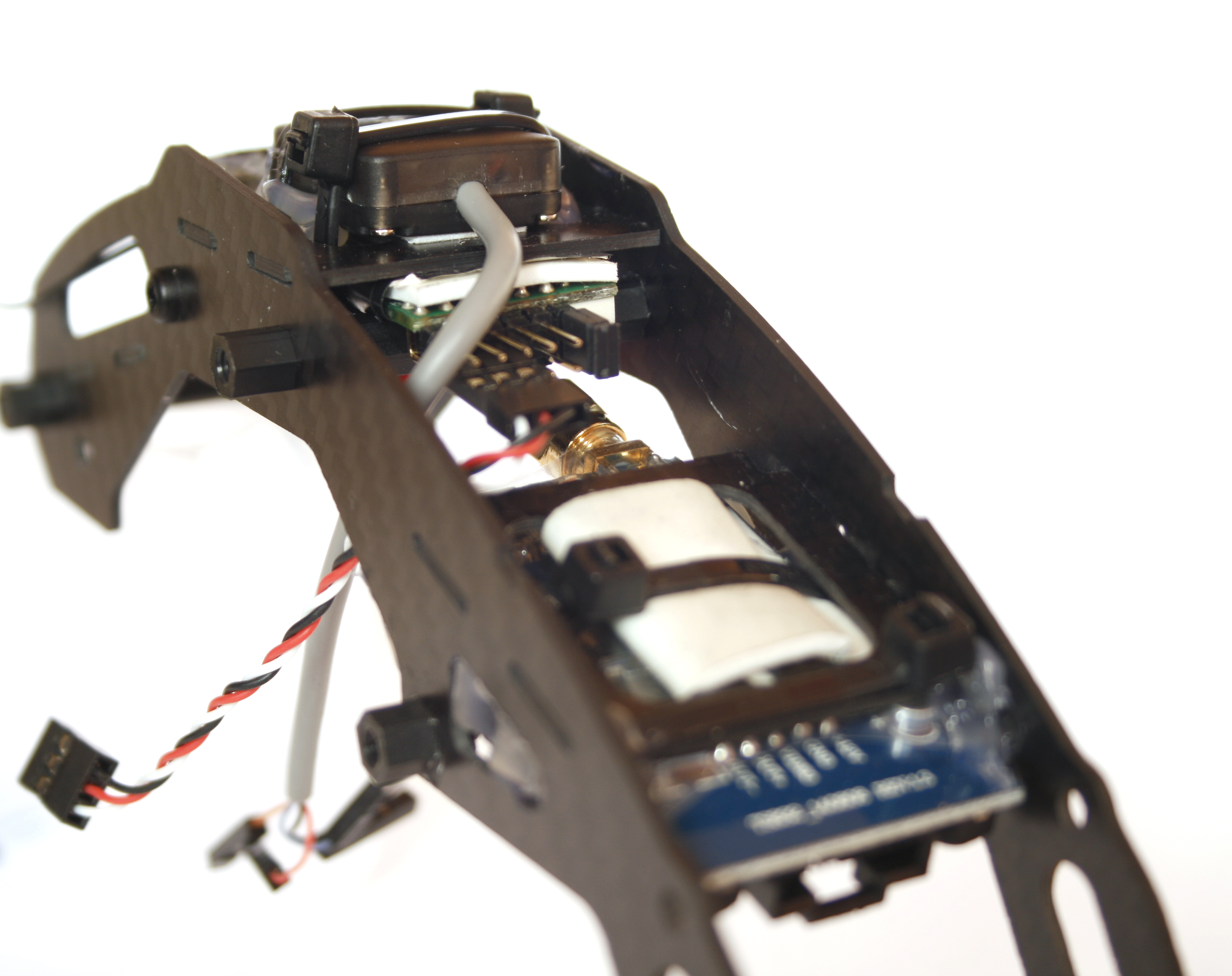
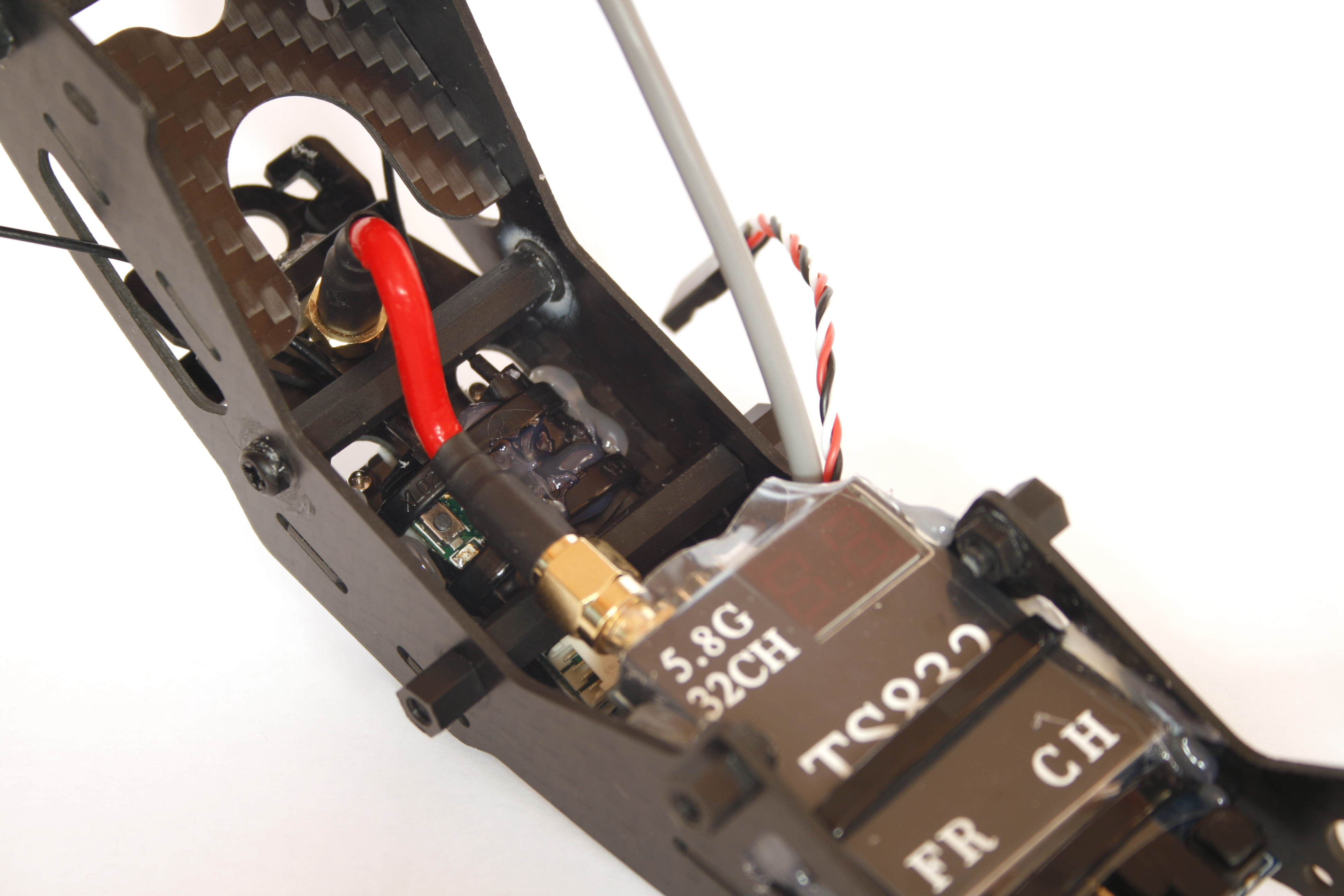
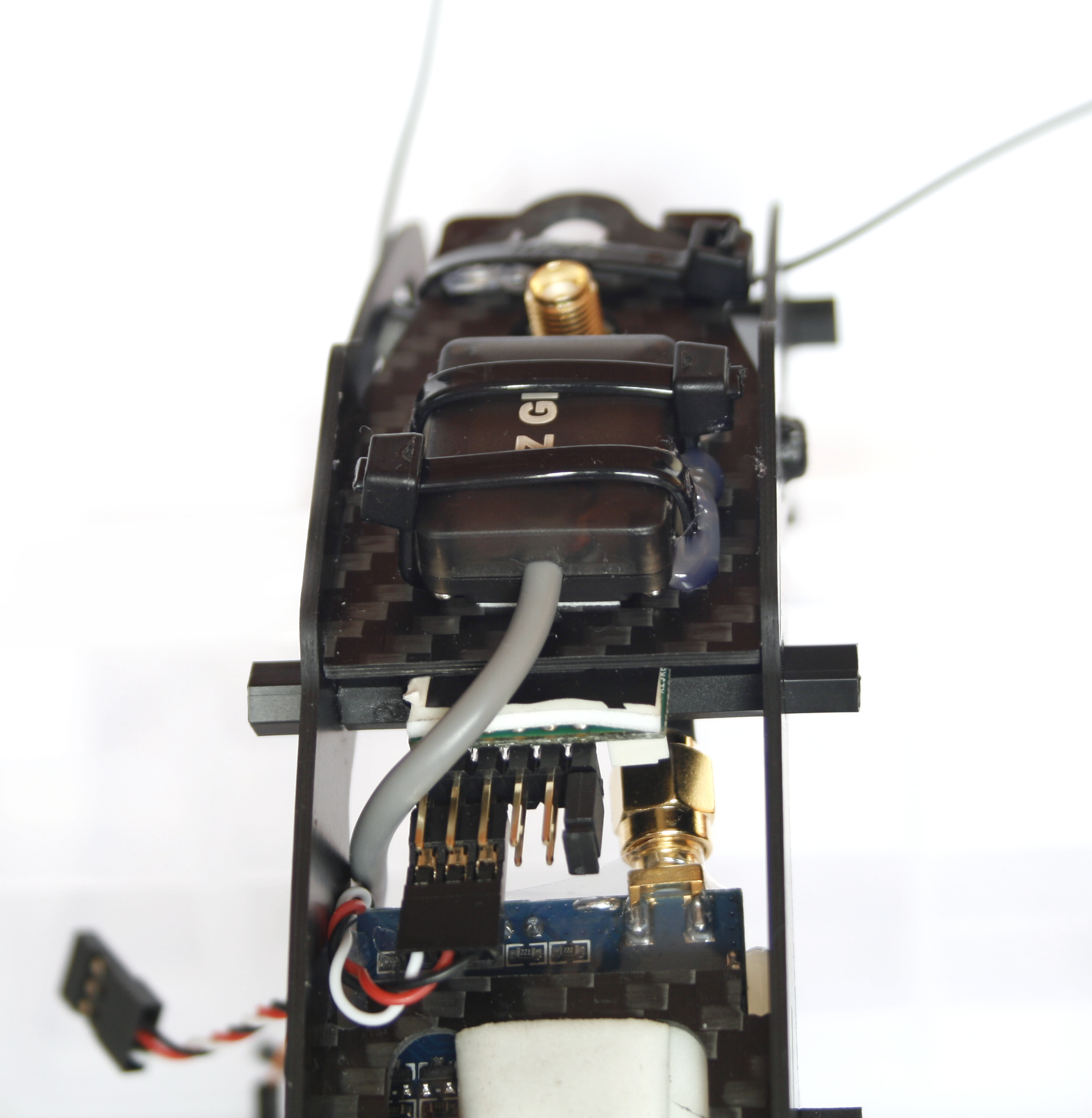
- на открывающейся части рамы - приёмник и видеопередатчик, так как они имеют антенны, которые удобнее всего выводить именно отсюда, а также GPS
- полётный контроллер - на верхней пластине
- OSD, камера - снизу
- регуляторы - на лучах
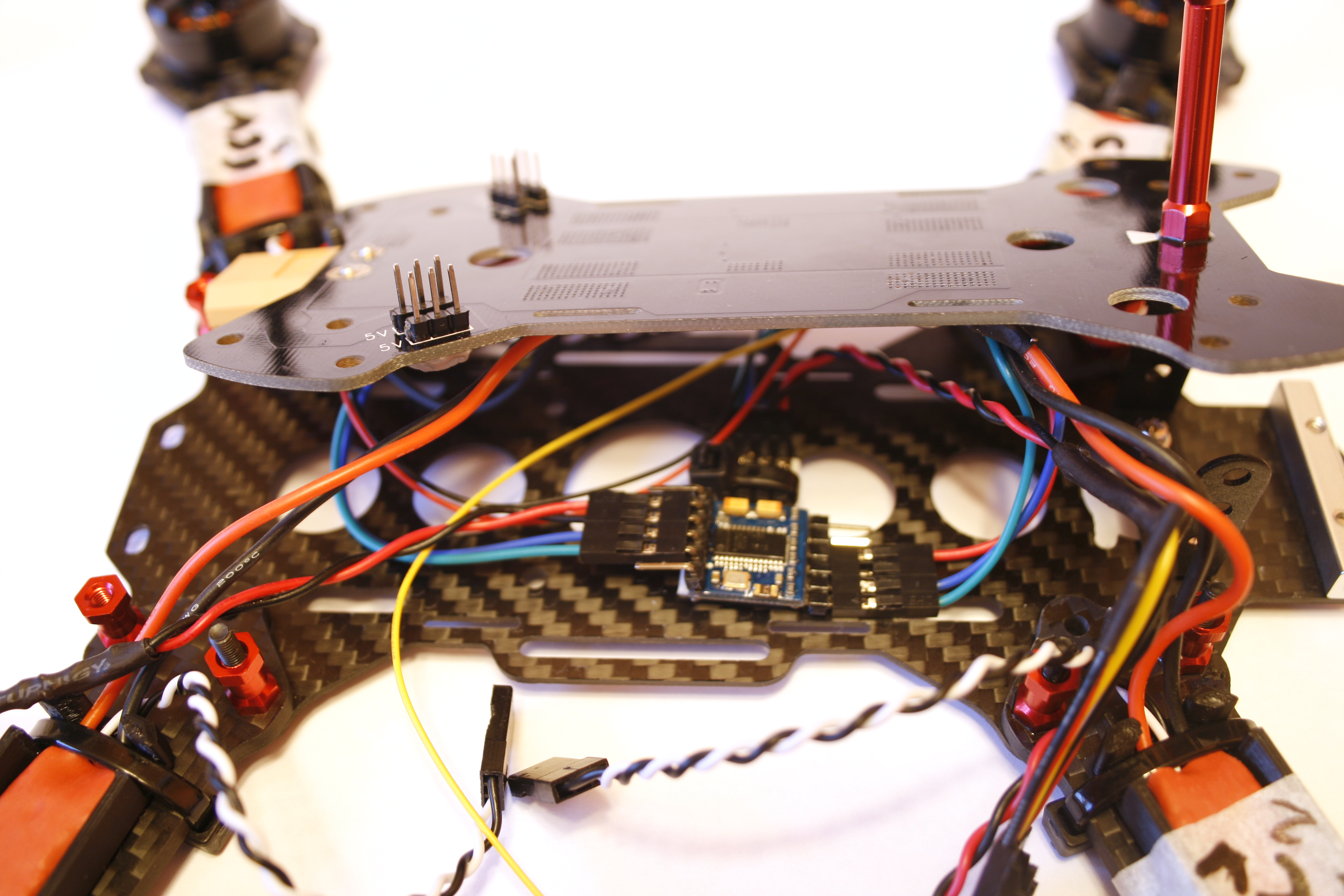
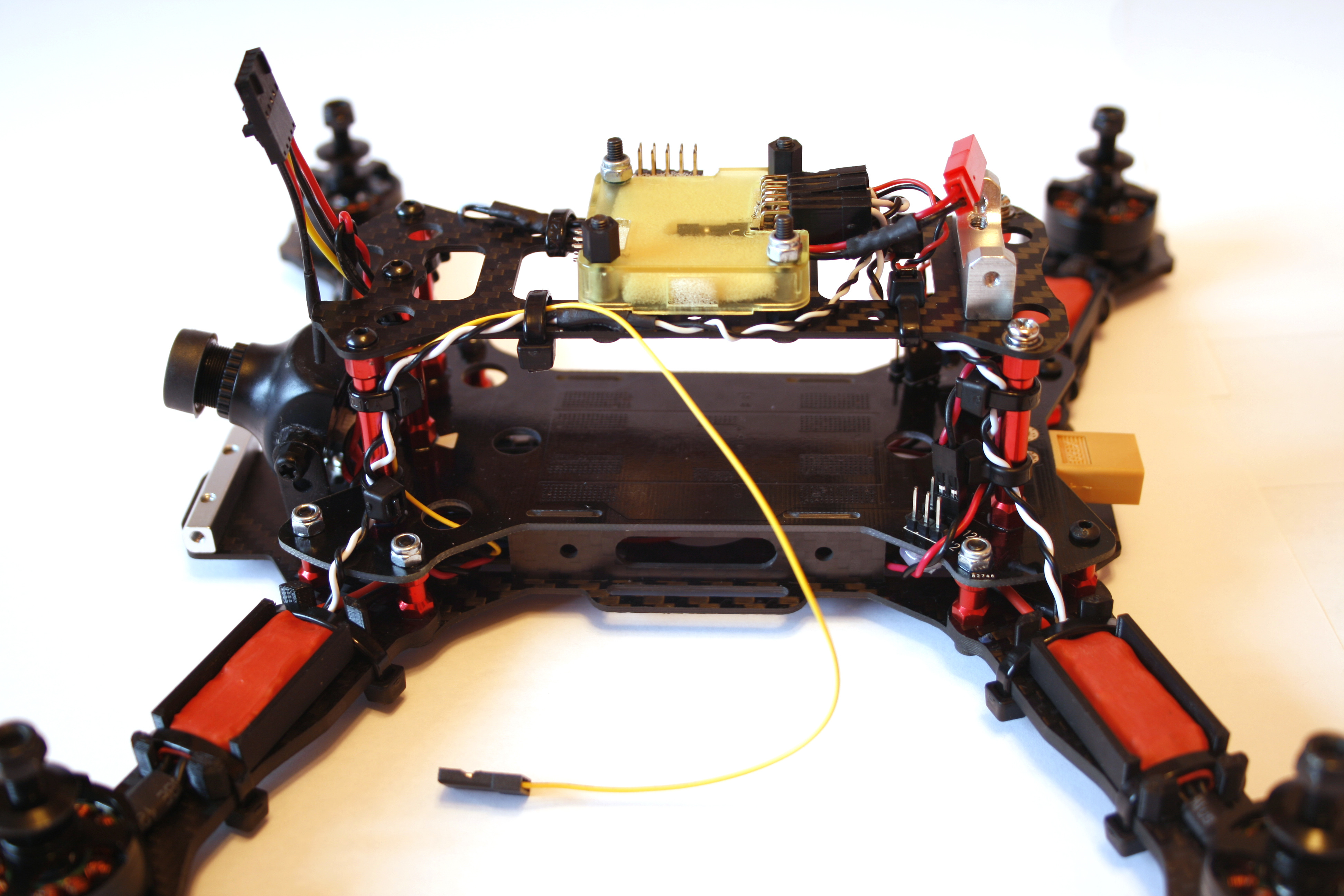
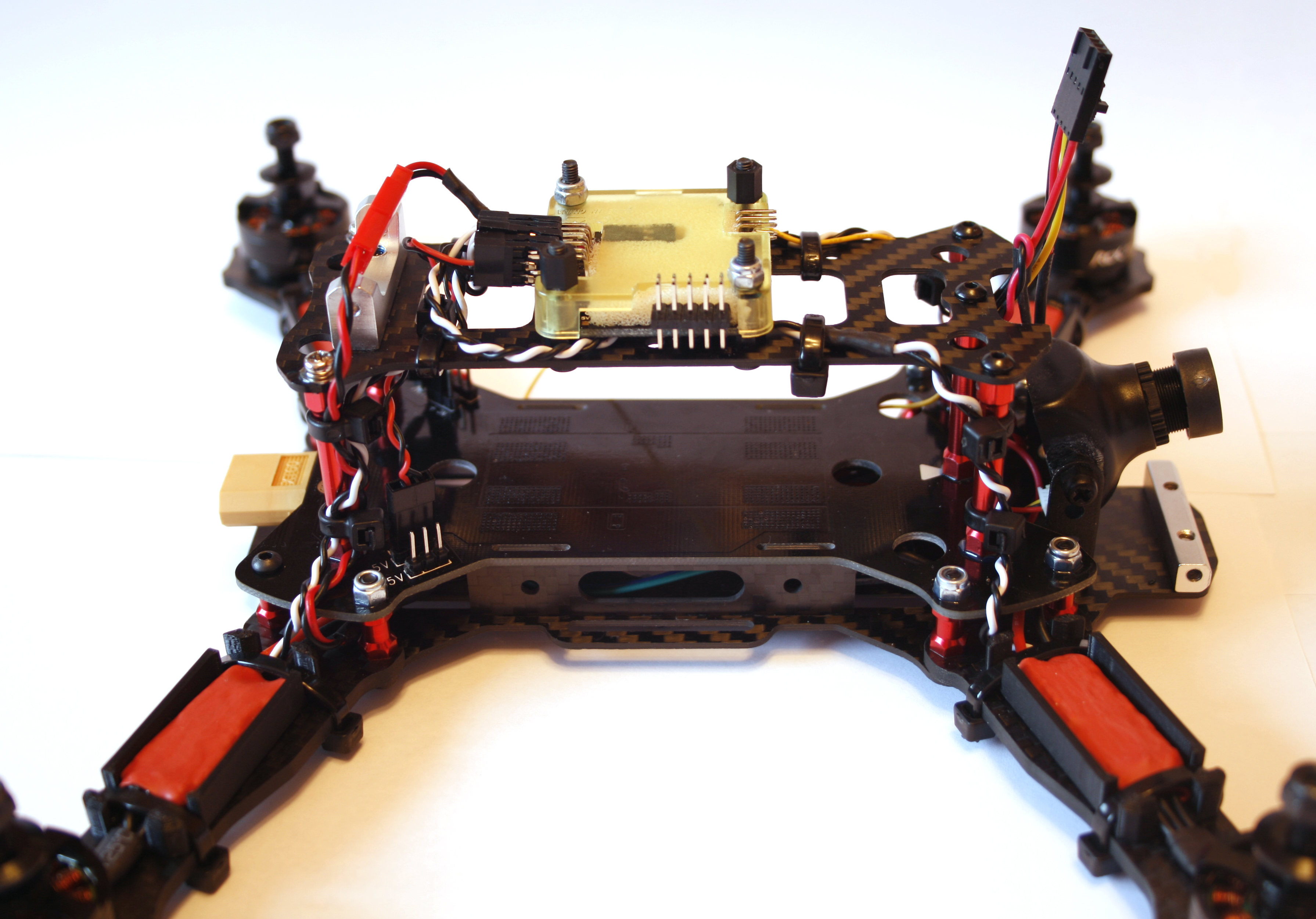
Регуляторы в полёте сильно греются, так что разумнее расположить их на лучах, где их обдувают пропеллеры, а не на нижней площадке, где они сами будут греть батарею. В итоге на самой большой площадке квадрокоптера у меня располагалась только самая маленькая плата - OSD.
В отличии от предыдущей сборки, на этот раз я решил использовать коннекторы на проводах везде, где это можно/нужно. Ремонт и замена комплектующих становятся проще, но проводка получается более громоздкой. Учитывая, что Micro MinimOSD имеет свойство гореть, "ремонт" и "замена" - не пустые слова.
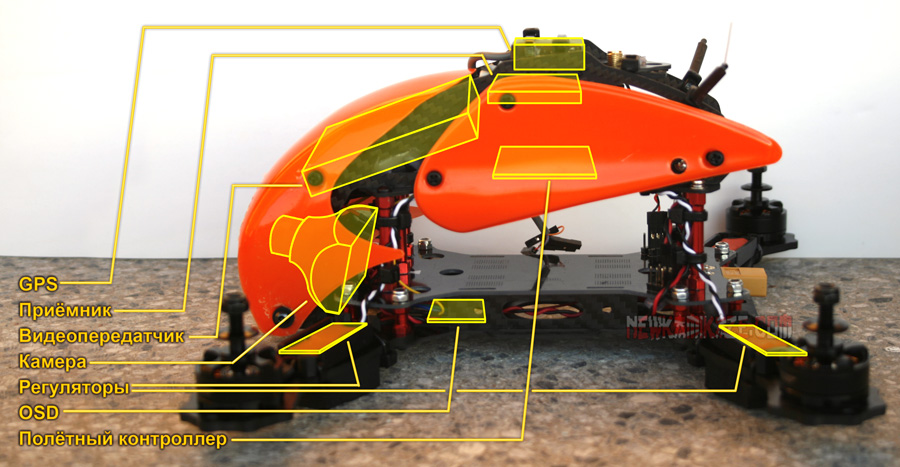
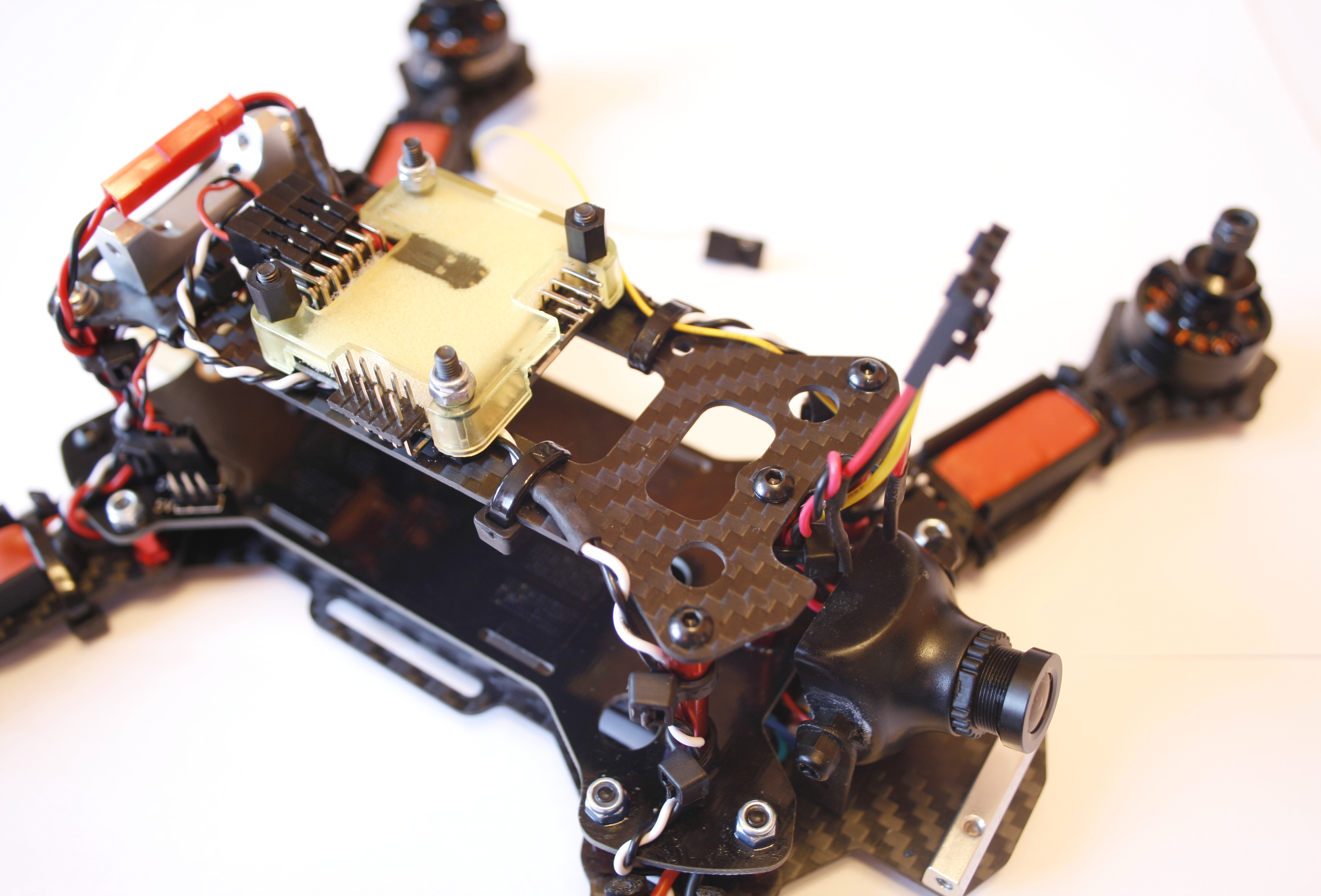
Компоновка квадрокоптера
Предсборочная настройка
Перед сборкой, как обычно, надо уделить внимание деталям, которые потом станут труднодоступны. А именно: настройка приёмника, балансировка моторов и прошивка OSD и регуляторов. О приёмнике я уже писал, нет смысла повторяться.
MinimOSD я прошил последней версией MWOSD. Как это сделать через FTDI-программатор, а главное где взять для него старые драйвера, показано в этом видео. Главное, не забыть перед прошивкой раскомментировать в Config.h следующие строки:
#define MINIMOSD
#define CLEANFLIGHT
Часть настроек мне пришлось менять уже после настройки полётного контроллера, так что имейте виду такой вариант и делайте доступ к плате OSD максимально удобным. В частности, выяснилось, что вольтаж батареи, подключенной напрямую, отображается как Video Voltage. При этом, если выключить отображение главного напряжения (убрать флажок Display Voltage в разделе Main Voltage), то исчезнут все показатели напряжения, включая и нужный. Второй новостью оказалось то, что монитор в шлеме Quanum Goggle V2 достаточно сильно обрезает картинку и это надо учитывать при позиционировании элементов. По факту, невидимым остаётся всё, что находится за пределами жёлтой рамки (см. изображение ниже).
Окончательный вариант моих настроек выглядит так:
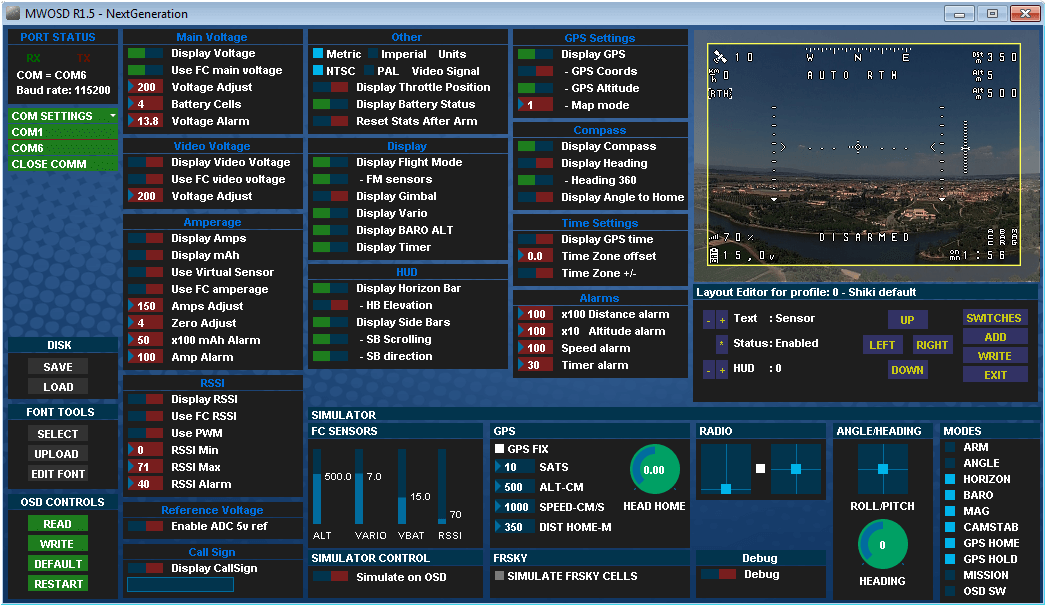
Настройки MWOSD
Регуляторы я через программатор прошил последней версией BlHeli (на момент сборки квадрокоптера - 14.3). По идее, всё это можно было сделать потом, через ПК, но придётся прошивать его в BetaFlight. Как это сделать, показано тут.
Сборка
Смотря различные ролики по сборке квадриков, обратил внимание, что есть две методики сборки, причём отличаются они только до определённого момента. Наиболее популярна сборка "от центра к краям": сначала силовой провод припаивается к PDB, затем туда же паяются провода регуляторов и только после этого к раме крепятся лучи, к лучам - моторы, которые спаиваются с регуляторами. Я сам сторонник сборки "от переферии к центру", так что начал с того, что укоротил провода моторов и сразу припаял их к регуляторам. Далее, сами регуляторы я покрыл изолирующим лаком (лучше не спреем, а жидкостью), заплавил в термоусадку и закрепил всё на лучах. В последний момент я решил распечатать на 3D-принтере защиту для регуляторов, которая подошла идеально. В качестве завершающего аккорда, я приклеил по кусочку двухстороннего скотча снизу каждого луча для защиты подшипников от пыли. Получилось весьма симпатично


Всё, лучи с моторами у меня полностью в сборе, к ним уже можно не возвращаться. Следующим этапом я подготовил камеру и полётный контроллер. Идея камеры в корпусе и со скобкой мне очень понравилась тем, что её легко крепить и легко регулировать угол наклона. Коротенькие шурупы-саморезы, которыми камера крепится к скобе, лучше выкинуть сразу. Вместо них я суперклеем приклеил нейлоновые гайки. Но надо учитывать, что объектив крепится только к пластиковому корпусу и никак не крепится к плате камеры. То есть в случае поломки корпуса, камера будет непригодной к использованию и надо будет делать или покупать новый корпус или держатель для объектива.

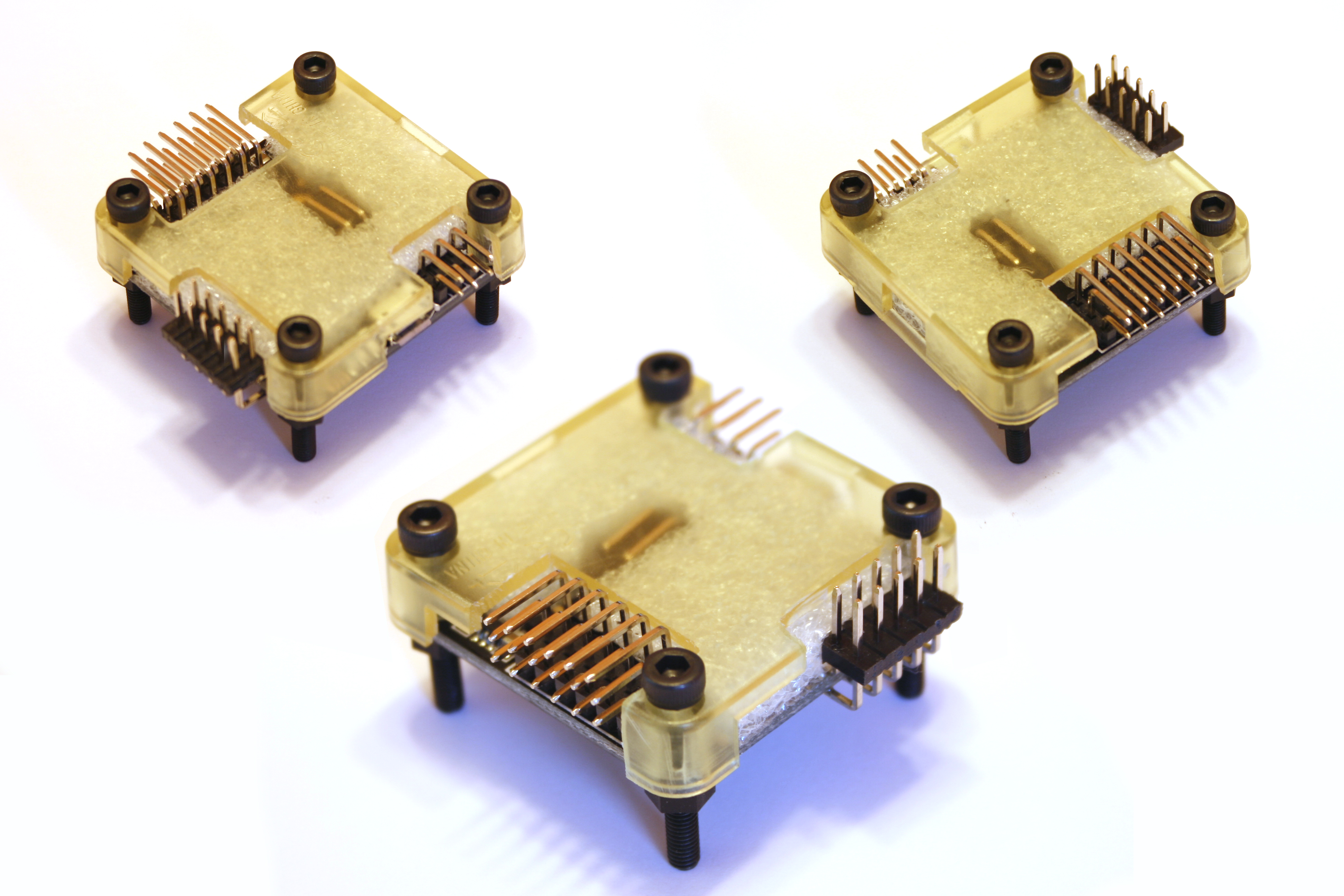
С полётным контроллером всё оказалось куда замысловатее. Если бы я использовал обычную Acro-версию (6DOF), сложностей бы не было, но у меня была версия 10DOF, которая среди прочего имеет и барометр, использующийся для удержания высоты. Так как барометр замеряет атмосферное давление, он очень критичен к разного рода "задувашкам". В квадрокоптере это, в первую очередь, завихрения от пропеллеров. Само по себе то, что у меня ПК будет стоять выше пропеллеров, уже хорошо. Вдобавок, производители настоятельно рекомендуют накрывать барометр на плате поролоном (со многими ПК он идёт в комплекте, но не в моём случае), но на форумах пишут, что и этого недостаточно. В итоге я, помимо поролона, накрыл плату контроллера пластиковой крышкой. Надеюсь, этого достаточно.
Уже после сборки выяснился ещё один момент: оказывается, барометр также боится и света. Поначалу думал, что это шутка, но нет. Так что я заклеил весь корпус своего ПК непрозрачной чёрной изолентой. Также можно использовать непрозрачный корпус или покрасить прозрачный.
Веселье на этом не заканчивается, так как на ПК ещё есть и магнитометр (он же компас). Так что крайне желательно провести силовые линии подальше от него.
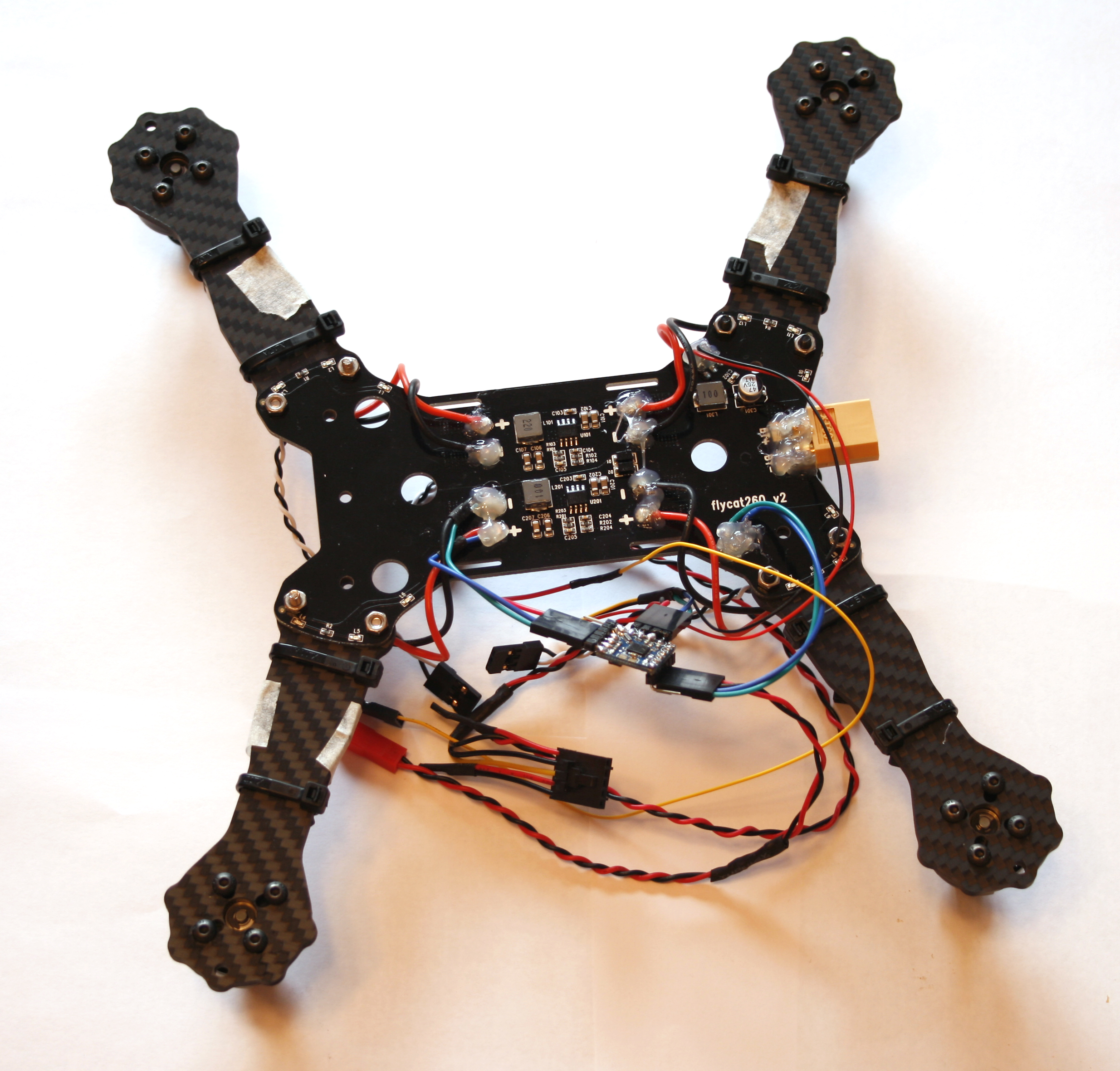
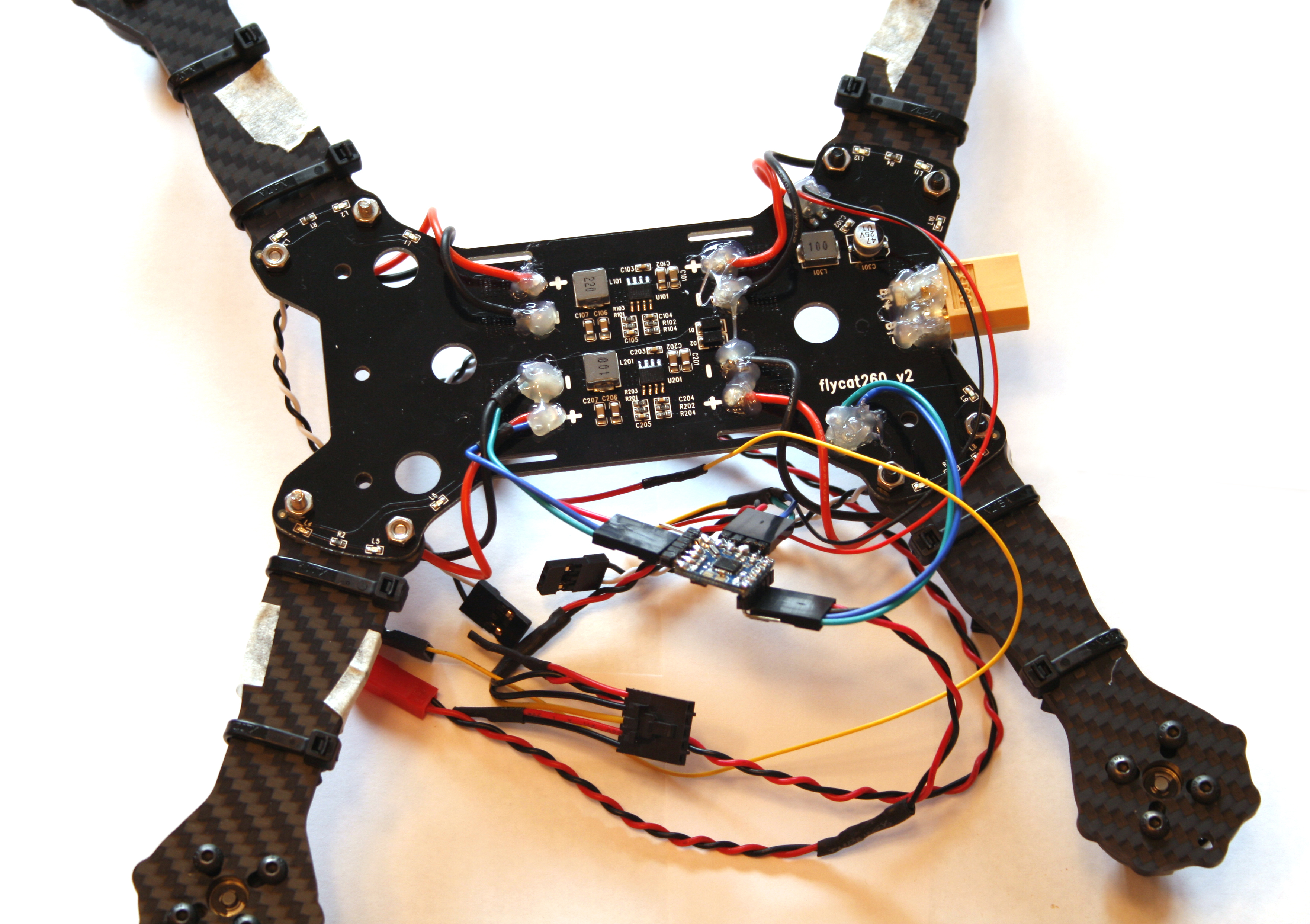
Далее наступила очередь рамы, точнее PDB. Я припаял разъём батареи безо всяких проводов непосредственно к PDB, мне показалось, что такое крепление будет достаточно крепким. На нижней стороне платы к выходным разъёмам BEC`ов я припаял провода для питания OSD (5В) и камеры (12В). В случае помех на видео, в цепь питания камеры без особой переделки можно будет добавить LC-фильтр. С контактов питания регуляторов ("чистый" ток с батареи) я вывел провода для определения напряжения батареи (vbat). Места пайки на PDB я дополнительно закрепил термоклеем, а также покрыл всю плату изолирующим лаком.
После этого я припаял все необходимые провода к OSD (большая часть из которых уходила за верхний уровень) и начал собирать раму. Видеоинструкцию по сборке можно посмотреть здесь, хотя мне она не понадобилась, из комплектной инструкции и так всё было предельно понятно.
Пару слов о качестве рамы RoboCat. Детали рамы везде звонятся мультиметром, лучи - не везде, запасные лучи - везде. Резка - неплохая, руки пачкает, края не острые. Кстати, со временем карбон начинает расслаиваться на торцах деталей. Существенно замедлить это процесс можно промазав края деталей супер-клеем.
Сборку рамы я начал с откидывающейся части. Пластину, на которую крепится камера, я не ставил. Сразу же на собранную конструкцию (без декоративных обтекателей) я закрепил приёмник, видеопередатчик с удлинителем антенны и GPS. Первые два я разместил так, чтобы при откидывании этой части рамы иметь доступ к их элементам управления (выбор канала и кнопка бинда). Кстати, уже после сборки я нашёл информацию, что Naze32 сильно фонит на GPS. Так что, для улучшения работы GPS, не лишним будет поставить медную пластину под антенну и ферритовое кольцо на провода.
Далее надо было собирать нижнюю часть рамы (то есть всю раму без откидывающейся части). Неприятностью оказалось то, что отверстия для крепления лучей на PDB не совпадали с оными на нижней пластине рамы. Пришлось совмещать их надфилем, причём делать это лучше не на PDB (есть риск повредить контактные дорожки), а на детали рамы. Как следствие, пришлось ещё смещать отверстия и на верхней пластине рамы, дабы избежать перекоса. Но в конечном итоге рама всё равно получилась немного "винтом". Если положить её на ровную поверхность, кончик одного из лучей оказывался задранным вверх на 5-6мм. Неприятно, но не смертельно.
Перед сборкой нижней части я проделал два дополнительных отверстия в самой нижней пластине и закрепил скобку для крепления камеры. Плату OSD саму по себе я никак не крепил, но притянул стяжкой один из подключённых разъёмов.
После этого я закрепил камеру и ПК и подключил к ним все необходимые провода. Чтобы коннекторы регуляторов не упирались в видеопередатчик, пришлось развернуть ПК на 180 градусов. Надо будет обязательно сделать на это поправку при настройке контролера.
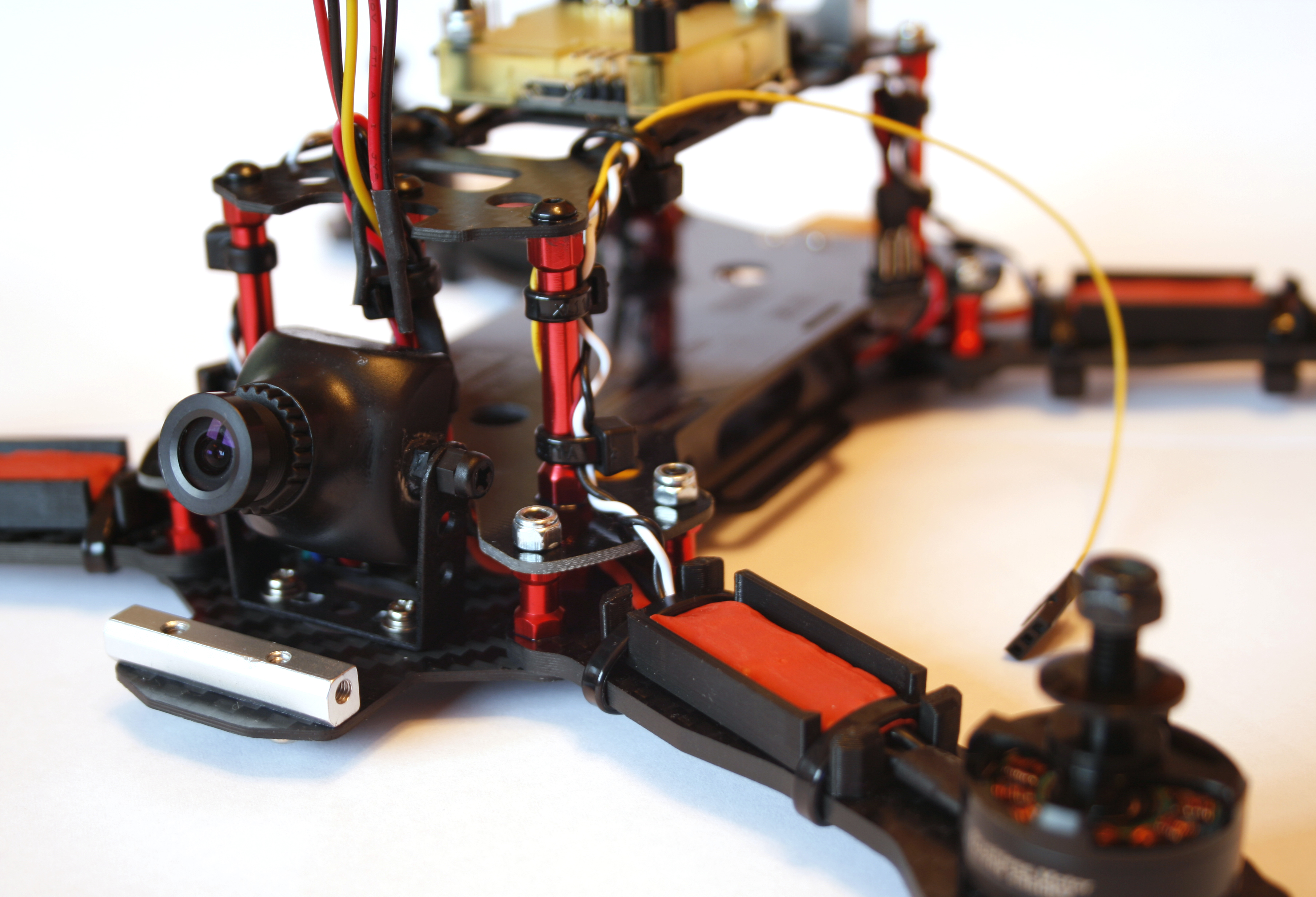
Далее можно было "женить" верхнюю и нижнюю детали рамы и закреплять декоративные кожухи. Правда, выяснилось, что у меня камера стоит несколько дальше от переднего обтекателя, чем это рассчитано. Пришлось увеличить отверстие для объектива в обтекателе.
Следующим этапом я подключил приёмник и GPS к ПК. Исходя из описания GPS-модуля на странице магазина, синий провод идёт к TX контроллера (3-й канал), а оранжевый - к RX (4-й канал).
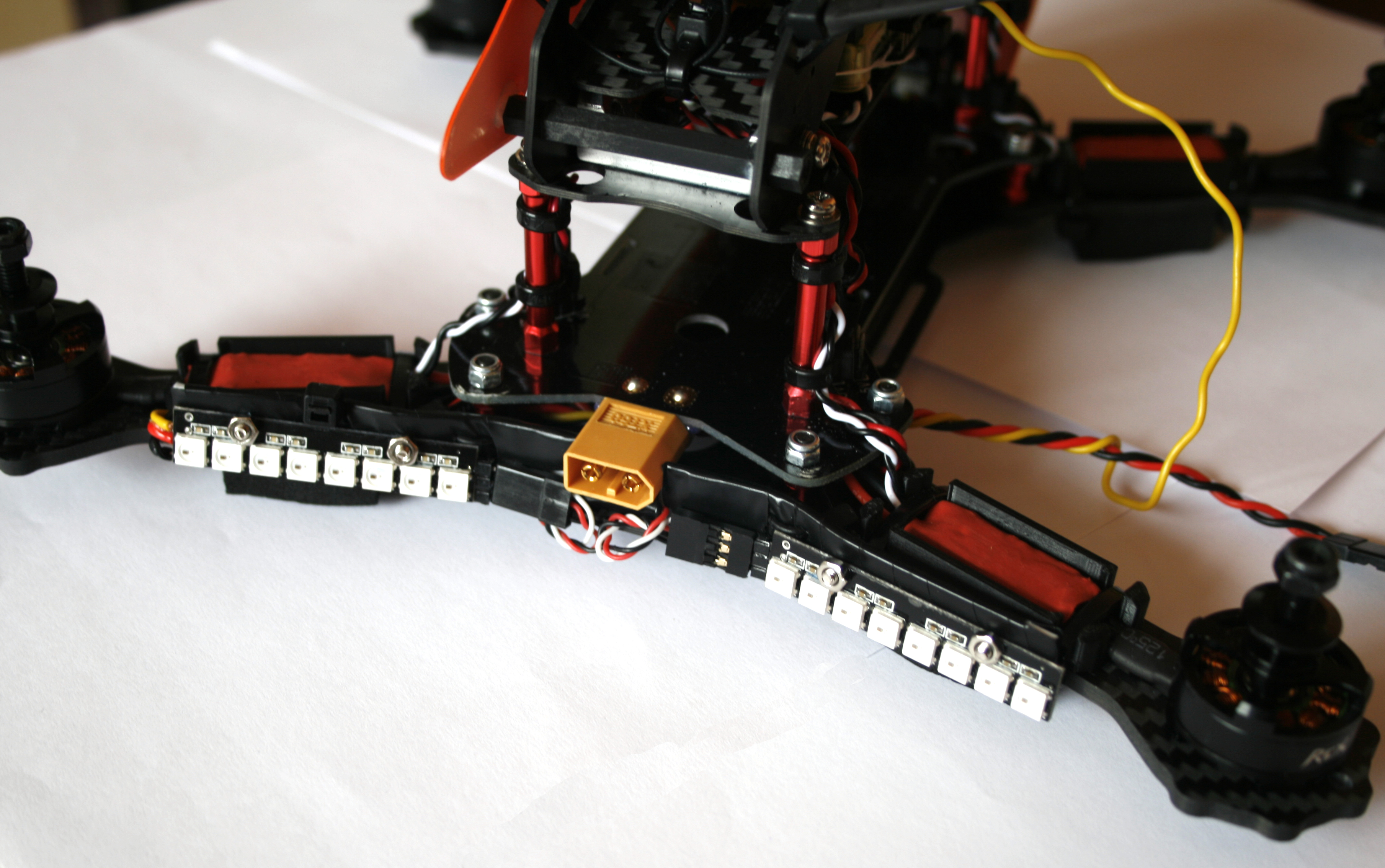
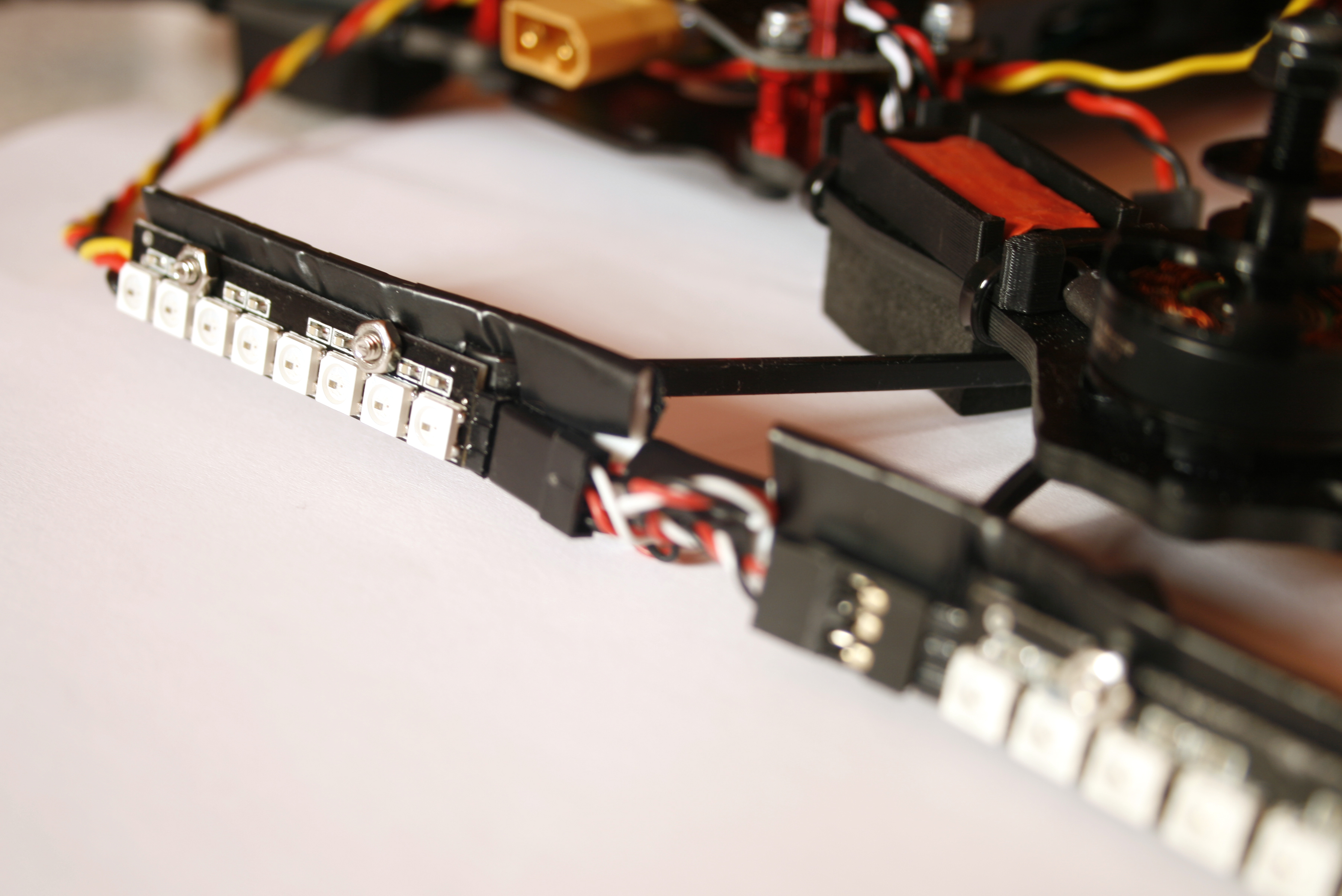
Последнее, что осталось сделать - закрепить планки со светодиодами. Крепить непосредственно на лучи было неудобно, поэтому я вырезал полоску из достаточно гибкого пластика (тюбик от строительного герметика) и болтиками прикрутил к ней планки. Между собой я соединил их проводами через коннекторы, а входные провода припаял напрямую.
На этом сборка квадрокоптера закончена, теперь предстоит первое подключение (обязательно через лампочку!) и настройка. Об этом в следующей статье.


Знатно накомментили: