
Сборка комнатного FPV-квадрокоптера

Как именно я "докатился" до сборки уже четвёртого квадрокоптера, я писал тут. Что именно собирать, тоже думал недолго - комнатный FPV-микролёт для тренировок. Хитом сезона "зима 2016/2017" стали квадрики, называемые "tiny whoop". Сейчас у каждого китайского производителя есть не одна такая модель, а года полтора назад Blade Inductrix, один из первопроходцев направления, смотрелся весьма диковинно. Вероятно, с тех пор в русском языке прижилось название "импеллерный" для подобных моделей. Я не специалист, но мне кажется, что в данном случае нельзя считать пропеллер и его кожух полноценным импеллером, скорее, тут только внешнее сходство. В пользу этого говорит и то, что в английском это слово редко применяют к "tiny whoop". Как бы то ни было, пусть будет "импеллерным" за неимением другого.

Во многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.
Комплектующие
Так как летать я планировал исключительно дома, я сразу определился, что бесколлекторный сетап для меня будет избыточен. Получается, коллекторный, но максимально лёгкий. Ниже список деталей и комментарии к некоторым из них.
- Рама FuriBee
- ПК Eachine AIOF3_BRUSHED с приёмником Flysky
- Моторы Racerstar 615 59000RPM без коннекторов
- Камера Super Light 1000TVL Mini FPV Camera
- Видеопередатчик Eachine VTX01
- Пропеллеры Eachine E010
Теперь немного "почему" и "зачем". Начну с ПК, с его выбором вообще не думал, так как это единственный вариант со встроенным приёмником (на момент заказа деталей), поддерживающий протокол Flysky AFHDS 2A. Примерно также было с моторами - выбор на тот момент был небольшой. Позднее появились Boldclash 6x15mm 18000KV, которые, говорят, ещё лучше. Кстати, ещё по "Хабсану" помню, что коллекторные моторы такого размера - расходник и одного комплекта точно будет недостаточно. Подборка информации и сравнение разных 6мм коллекторных моторов тут.
Чуть сложнее было с рамами. Карбоновые рамы для подобного квадрокоптера - не вариант. Тонкий карбон необходимой прочности не обеспечит, вдобавок ещё может расслаиваться, а толстый карбон даст чрезмерный вес. Гораздо предпочтительнее пружинящий пластик. Таких рам немало: Eachine E010, JJRC H36, FuriBee F36 и т.д. При внешней идентичности, качество пластика и вес у них разные. Больше всех на форумах хвалят раму FuriBee F36, так как она на 1-1,5 г легче собратьев, её пластик менее ломкий, а рёбра жесткости спроектированы более продуманно. Я заказал сразу две. Совсем недавно появилась ещё одна, крайне привлекательная рама.
Для FPV многие используют комбо-наборы, вроде CM275T или Eachine EF-02. Я тоже сначала сколонялся к такому варианту, хотя пришлось бы вмешиваться в конструкцию, чтобы подключить OSD с ПК. Познее я всё же решил в пользу отдельной камеры и передатчика. Во-первых, больше гибкости в плане компоновки. Во-вторых, камеру можно взять получше, чем идёт в комплектах. Ну и в-третьих, отдельный передатчик чаще комплектуется легковесной антенной-диполем, в то время как у комбо чаще увесистые "клевера". На форумах вообще пишут, что для дома и монополя достаточно.
Пропеллеры к таким рамам лучше всего выбирать специализированные, с четырьмя или двумя (обрезанные) лопастями. Тут хороший тест пропеллеров для таких квадриков. Причём, если рама у FuriBee F36 лучше, чем у Eachine E010, то с пропеллерами всё наоборот. Пропы F36 хуже балансированы, что приводит к вибрациям и более громкой работе. Совсем недавно появились также трёхлопастные, но на форумах их не особо хвалят.
Батареи не покупал вообще, есть почти десяток от "Хабсана" и Eachine H8 3D Mini.
Сборка
Так как детали приходили с большим разбросом по времени, квадрик собирал в два захода: сам квадрокоптер и FPV. В моём случае это пошло на пользу, так как помогло выбрать компоновку, которая показалась мне оптимальной. А именно: ПК под рамой, видеопередатчик - внутри, батарея - сверху, куда обычно крепят камеру, а камера - спереди. Пропеллеры в кадр не попадают вообще, да и развесовка неплохая.
Первым делом примерил платы к раме и подрезал, где того требовалось. Но без экстрима! На форумах видел, что кто-то в погоне за минимальным весом, срезает нижнюю "корзину" и дужки держателей моторов, также выполняющих роль шасси. На практике прирост от таких кастраций всего 0.58г.

Фото Андрея Моренко
Никаких схем проводок в этот раз я не делал, и так всё проще некуда. Ниже вся распиновка ПК.

Распиновка полётного контроллера Eachine AIOF3_BRUSHED
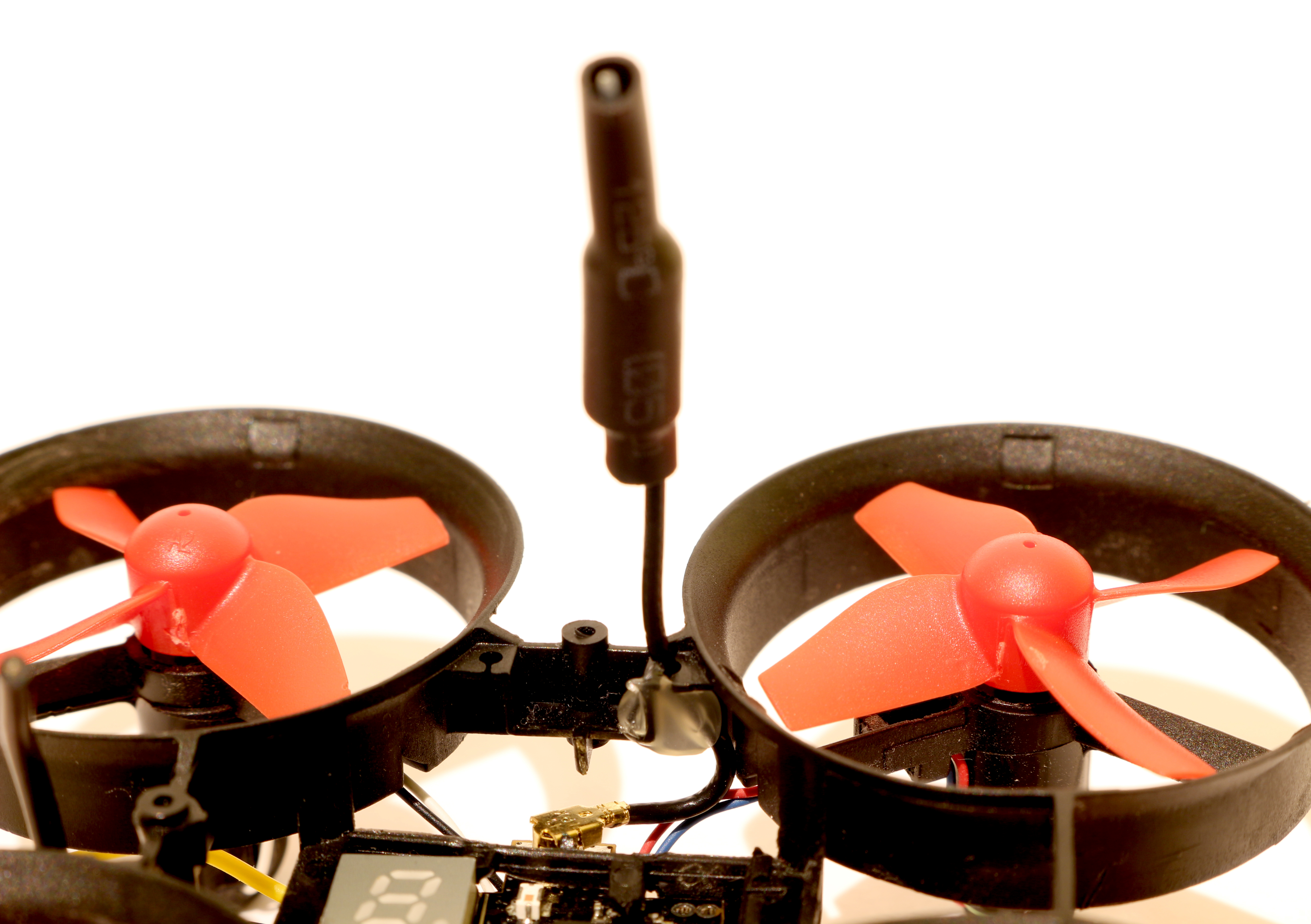
Видеопередатчик расположил внутри корзины так, что разъём для антенны через прорезь выступает наружу. Доступ к кнопке настройки каналов - сверху. Антенну капелькой термоклея закрепил к одному из рёбер жесткости рамы.

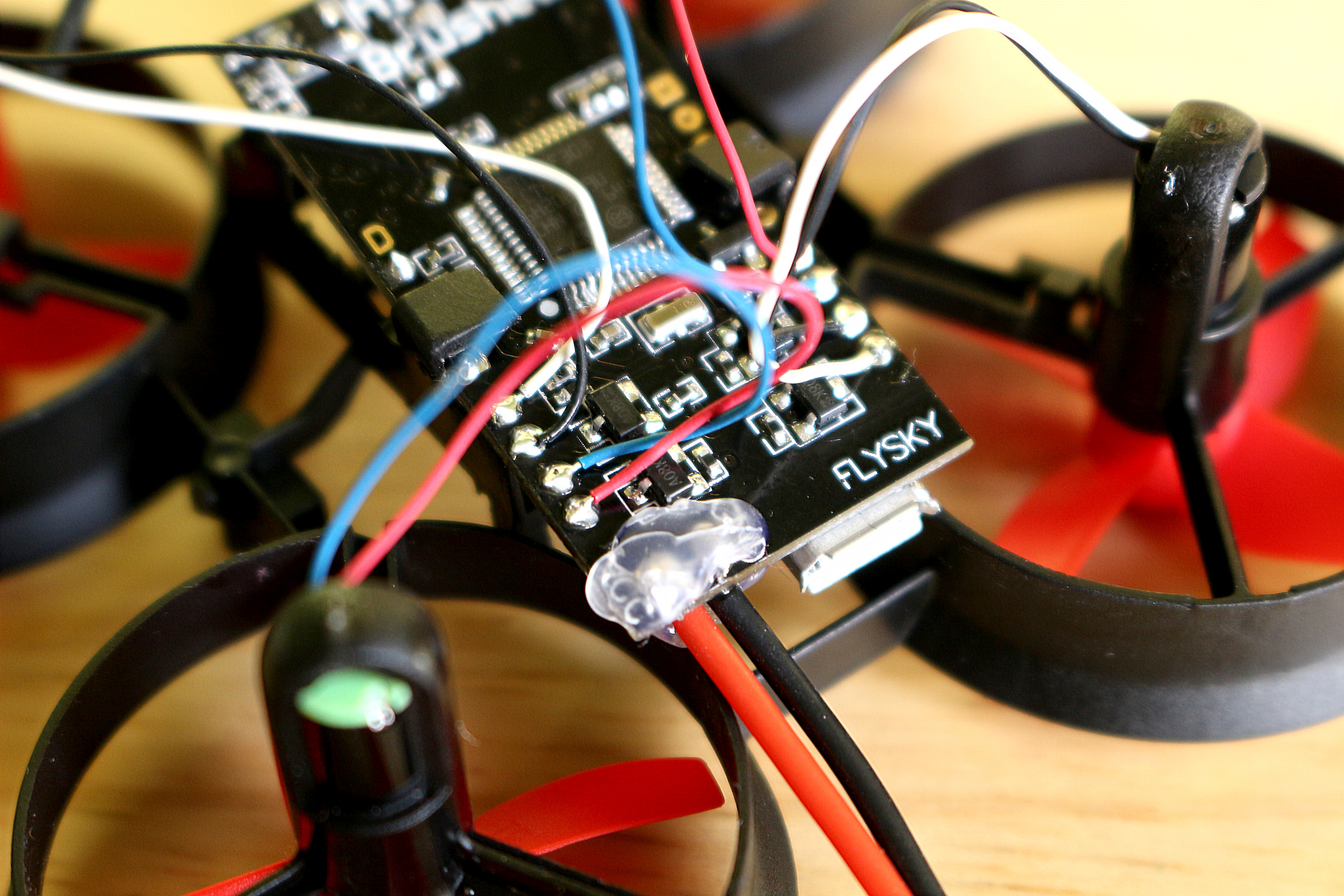
Полётный контроллер расположился сразу под видеопередатчиком. Он немного смещён назад, чтобы сбалансировать камеру, которая будет в передней части. Силовой провод, который шёл в комплекте с ПК, я использовать не стал, не понравилась его жёсткость. Нашёл аналогичный, но мягче. Это место спайки залил термоклеем, остальные не покрывал ничем, чтобы в случае замены компонентов легко можно было их отпаять. В отличие от бесколлекторных моторов, тут при пайке надо соблюдать полярность. Она такая: у моторов, вращающихся по часовой стрелке (CW), если смотреть сверху, "плюс" красный и "ноль" синий, у тех, что крутятся против часовой стрелки (CCW), белый "плюс" и чёрный "ноль".


Если купленные пропеллеры слишком свободно сидят на валу мотора или вообще болтаются на нём, можно вставить в отверстие нитку или леску и после этого одеть пропеллер на вал.
Для того, чтобы батарея сверху лежала ровно и не смещалась, я сделал для неё специальный паз, вклеив кусочки вспененного скотча в корзину рамы над видеопередатчиком. Фиксируется батарея кольцом, вырезанным из воздушного шарика.
Камера по задумке должна была располагаться в передней части. Я вырезал планку из прозрачного пластика от упаковки (по идее, можно и из пластиковой бутылки), по центру которой закрепил камеру. Саму планку приклеил двойным скотчем к кожухам пропеллеров. Угол наклона не регулируется, настроил его сразу.



Так как камера выступает вперёд, фронтальное столкновение придётся на неё. Имеет смысл защитить её. Я выбрал один из самых простых способов - ободок из скотча вокруг объектива. Вот и вся сборка.
Балансировка пропеллеров
Качество заводской балансировки моих пропеллеров меня вполне устроило. Но, к сожалению, так бывает не всегда и тогда приходится балансировать самому. Для этого есть несколько способов разной степени технологичности. Например, можно установить на смартфон приложение-сейсмограф. Затем наклеить небольшой кусочек изоленты на одну из лопастей и, подключив к 1.5В батарейке, прислонить мотор к смартфону. Затем надо повторить эту процедуру для всех остальных лопастей. Та, на которой вибрации были наименьшими и есть искомая. Теперь можно аналогичным образом поиграть с размером наклеиваемой изоленты.
Если вы доверяете своим рукам, можно вместо смартфона просто держать мотор в пальцах, положившись на тактильные ощущения. Ещё более простой вариант - одевать пропеллер на вертикально установленную толстую иголку, крутить и смотреть, какая лопасть будет проседать.
Привязка к передатчику (Bind)
Мне очень нравится, как реализована привязка на Turnigy Evolution - через меню. В случае с данными ПК, который совмещён с приёмником, есть небольшое отличие. Помимо выбора необходимого пункта меню в передатчике, надо зажать кнопку Bind на ПК (единственная кнопка на нём) и подключить питание. Должен замерцать зелёный индикатор, после чего надо отключить питание ПК. Всё.
Прошивка и настройка Betaflight
С полётными контроллерами Omnibus (а мой Eachine AIOF3_BRUSHED является его клоном) я раньше не сталкивался и не знал, что с прошивкой там всё не так просто. ПК без проблем определяется конфигуратором BetaFlight и настраивается, но вот войти в бутлоадер для обновления прошивки у меня никак не получалось. Долгое время летал на предустановленной прошивке (BetaFlight 3.0.1) и только ради этой статьи решил победить бутлоадер. Нашёл пару статей, которые очень помогли: первая и вторая. Правда, порядок действий, при котором я получил положительный результат, оказался несколько иным. Сначал я установил драйвера Zadig, а потом заменил их утилитой ImpulseRC. На практике это заняло пару вечеров, но последняя версия BetaFlight всё же была установлена.
Настройки "с нуля" отлично описаны в мануале к ПК, ниже приведу их в своём переводе и со своими дополнениями.
Вкладка Setup
- Сделал калибровку акселерометра.
Вкладка Ports
- Включил MSP для порта UART1.
Вкладка Configuration
- В разделе "ESC/Motor protocol" выбрал BRUSHED в качестве протокола регуляторов.
- Чтобы моторы всегда вращались в заармленном состоянии, отключил MOTOR_STOP.
- Уменьшил значение "Minimum Throttle" до 1040. Это обороты холостого хода, подбирал субъективно.
- В "Reciever" выбрал протокол приёмника "PPM RX Input".
- В "Other Features" отключил всё, кроме OSD.
Вкладка Modes
- Повесил на переключатели арминг моторов (AUX2) и переключение полётных режимов (AUX1).
Вкладка OSD
- В "Elements" выбрал данные для отображения на экране.
- В "Units" установил вывод данных в метрической системе.
Ниже мой дамп настроек, отличных от дефолтных (diff):
Dump настроек BetaFlight
# diff all
# Betaflight / OMNIBUS 3.1.7 Apr 3 2017 / 22:14:20 (e1c4b5c)
defaults
feature -BLACKBOX
feature -SDCARD
serial 0 1 115200 57600 0 115200
aux 0 0 1 1525 2100
aux 1 1 0 900 1500
set min_throttle = 1040
set motor_pwm_protocol = BRUSHED
set osd_units = METRIC
set osd_vbat_pos = 2498
set osd_rssi_pos = 2105
set osd_flytimer_pos = 406
set osd_ontimer_pos = 2517
set osd_flymode_pos = 2082
set osd_crosshairs = 2048
set osd_mah_drawn_pos = 2466
profile 0
rateprofile 0
rateprofile 0
rateprofile 1
rateprofile 2
rateprofile 0
profile 1
rateprofile 0
rateprofile 0
rateprofile 1
rateprofile 2
rateprofile 0
profile 2
rateprofile 0
rateprofile 0
rateprofile 1
rateprofile 2
rateprofile 0
profile 0
save
Использование меню OSD
И напоследок, чтобы два раза не вставать, управление меню OSD с пульта (Mode 2):
- Открыть меню - при незапущенных моторах левый стик вправо и правый стик вверх
- Переключение страниц - влево/вправо левым стиком
- Перемещение по пунктам меню - вверх/вниз/влево/вправо правым стиком
- Изменение значений - влево/вправо левым стиком
- Выход из меню - навести курсор на EXIT или SAVE+EXIT и вправо левым стиком
Собственно, на этом всё. Теперь летать. Кстати, вес квадрокоптера без батареи получился 20г, что чересчур. Хорошим результатом считается 15-17г. С батареей же мой "пухлячок" и вовсе весит 30г. Хотя в точности весов я тоже не уверен.



Знатно накомментили:
Ещё вариант -- прогреть отверстия зажигалкой. Пластик слегка подплавится и отверстие станет уже. Главное, сам пропеллер не расплавить :)