
Сборка квадрокоптера на раме ZMR250 (часть 2) - настройка

Квадрокоптер собран и до полётов уже рукой подать, но надо ещё его натроить.
Во многих аспектах, данная статья выражает
субъективное мнение автора.
Спорить с ним бесполезно, он упёртый.
Настройка приёмника FrSky D4R-II
Собственно, эту часть, как я писал ранее, надо делать на этапе сборки, пока приёмник ещё не замурован в недрах рамы. Необходимо его забиндить и настроить failsafe. Как это делается можно посмотреть на видео или прочитать ниже.
Биндинг FrSky D4R-II
- установить оба DIP-переключателя на радио-модуле передатчика в нижнее положение
- нажать кнопку на радио-модуле и, удерживая её, включить передатчик и отпустить кнопку
- передатчик начнёт пищать. Пока он пищит, зажать кнопку F/S на приёмнике и, удерживая её, подать питание на приёмник через любой канал
- подождать пару секунд
- выключить передатчик
- отключить питание приёмника
Настройка Failsafe на FrSky D4R-II
- включить приёмник и передатчик
- перевести стики на аппаратуре в то положение, которое должен воспроизвести приёмник при потере сигнала (в моём случае левый стик в нижнем положении, правый - по центру)
- кратковременно (менее 1 секунды) нажать кнопку F/S на приёмнике. Если всё прошло успешно, светодиод на приёмнике дважды моргнёт зелёным
Первое подключение к батарее
Первое подключение батареи - процесс достаточно ответственный, как спуск судна со стапелей. Если где-то накосячили с проводкой, можно что-нибудь сжечь. Поэтому очень рекомендуется при первом подключении использовать 12-вольтовую автомобильную лампочку. Она подключается последовательно в цепь между батареей и квадрокоптером и служит, как предохранителем, так и индикатором: если она не горит - всё в порядке, если горят ярко - где-то замыкание, но никакие детали не сгорят.
 Подключение батареи через автомобильную лампочку
Подключение батареи через автомобильную лампочку

Также очень желательно при подключенной батарее проверить мультиметром раму и лучи. Как я уже писал выше, часто бывает так, что болтик, которым крепится мотор, повреждает изоляцию и замыкает питание одного или нескольких моторов на раму. Последствия бывают самые разные: у кого-то сразу идёт дым из мотора, а у кого-то квадрокоптер летает, но не очень адекватен в управлении.
Настройка CC3D через OpenPilot
Теперь непосредственно настройка CC3D. Как уже писалось в прошлой части, программа OpenPilot закрылась, а последний релиз был в мае 2015. На момент сборки квадрокоптера LibrePilot тоже ещё не "зарелизило" (первый релиз вышел в октябре 2015), так что пришлось ставить OpenPilot. Скачать её можно здесь, причём надо брать не последнюю версию, а версию 15.02.02, так как все последующие не поддерживают полётный контроллер CC3D.
Настройка контроллера в этой программе хорошо показана у Юлиана, здесь или здесь, так что я не буду подробно её расписывать, остановлюсь лишь на некоторых моментах.
При прохождении "Мастера настройки" я застопорился на калибровке регуляторов. Дальнейшее копание показало, что во время пайки я немного перегрел плату ПК и у неё отошёл сигнальный контакт регулятора первого мотора. Неприятность, но не проблема: я переназначил первый мотор на пятый канал. Пришлось полностью разобрать квадрокоптер и заново припаять провода к ПК. Тогда же я развернул ПК на 90 градусов.
"Мастера настройки" мне теперь было не пройти (на этапе калибровки регуляторов он "искал" первый регулятор на первом канале), так что пришлось всё настраивать вручную.
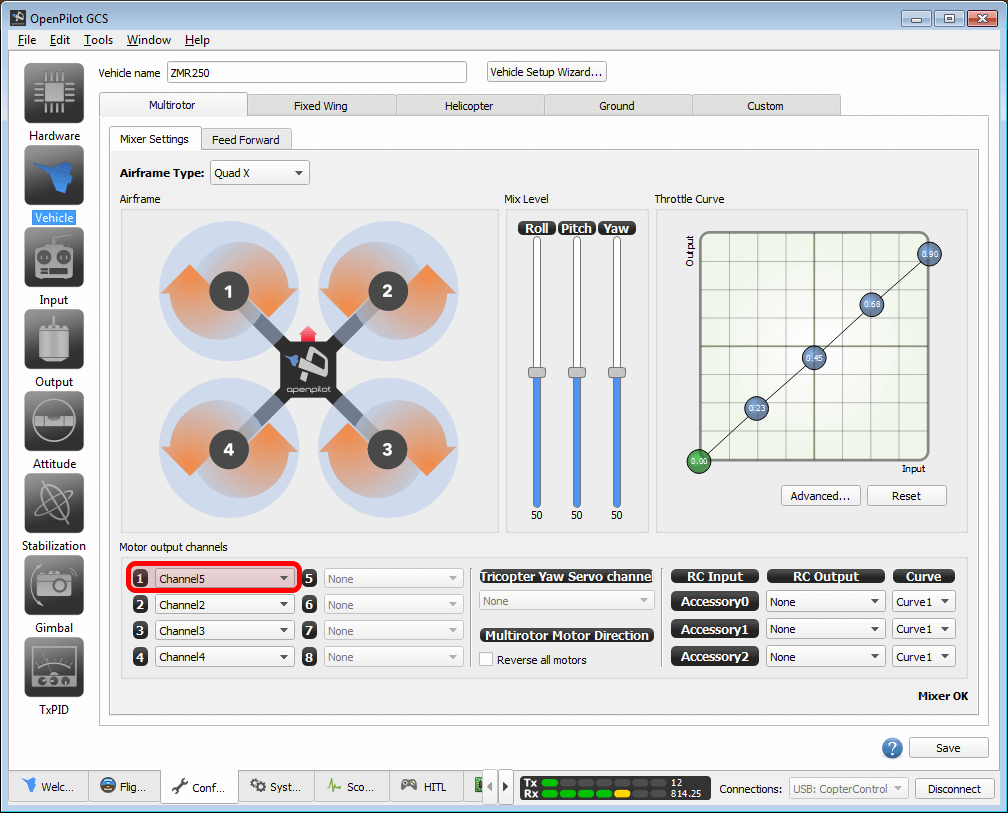
- В разделе "Vehicle" я, как и писал выше, переназначил первый мотор на пятый канал.
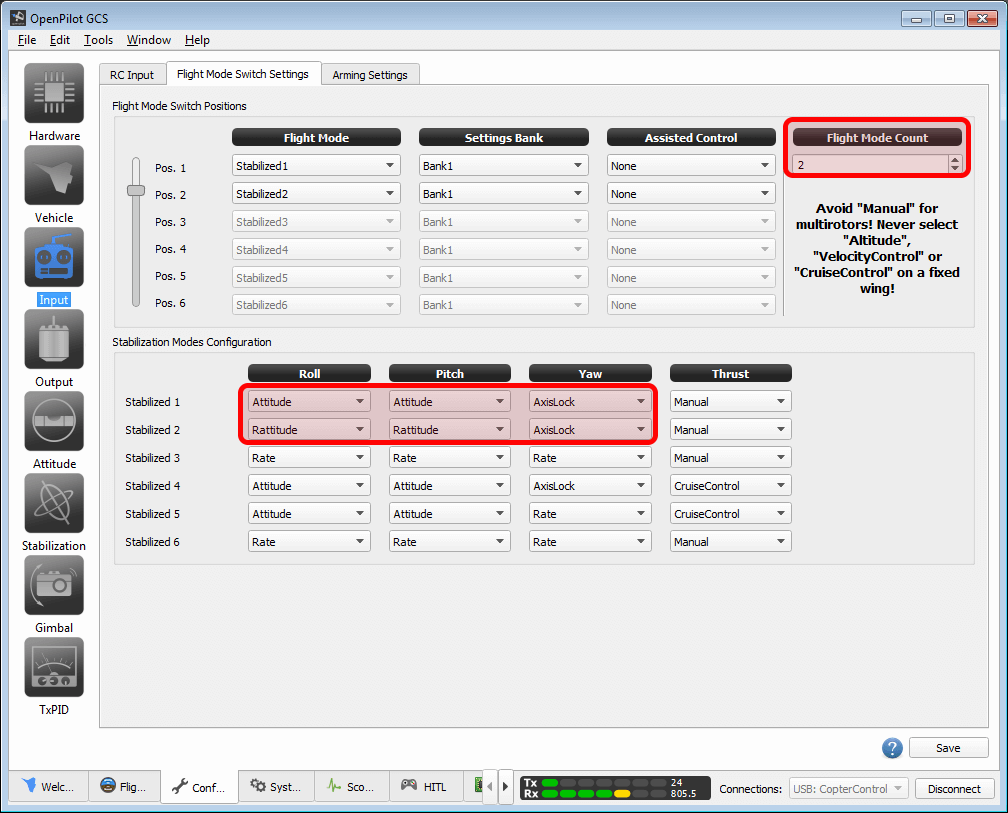
- Во многих видео (например, в двух из трёх, что я привёл выше) пилот использует двухпозиционный переключатель для смены полётных режимов, но при этом оставляет в OpenPilot три режима, как это сделано по умолчанию. В итоге нормально используются первый и третий режим, а второй активизируется на долю секунды при переключении. Это кажется мне как минимум нелогичным, ведь можно просто установить в OpenPilot реально необходимое количество режимов, то есть два. Делается это во вкладке "Flight Mode Switch Settings" раздела "Input", пункт называется "Flight Mode Count".
- Там же я выставил полётные режимы "Attitude" (полная стабилизация) и "Rattitude" (полная стабилизация, но при сильном отклонении стиков управление, как в ручном режиме, что позволяет делать флипы). Среди опытных пилотов более популярен режим "Rate". В нём нет никакой стабилизации, то есть при наклоне стика Pitch вперёд, квадрокоптер наклоняется вперёд, при возврате стика в нейтральное положение, квадрокоптер остаётся под тем же наклоном. Для возврата квадрокоптера в горизонтальное положение, необходимо отклонить стик назад и потом опять вернуть в нейтральное положение.
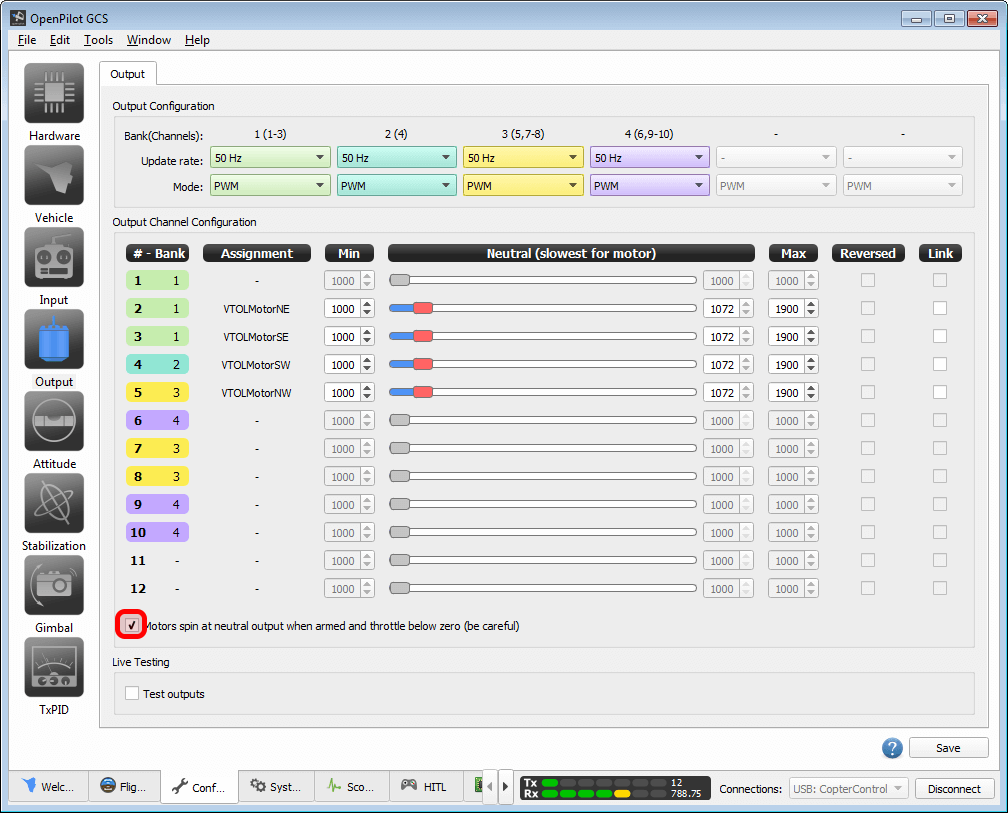
- Откалибровал регуляторы моторов. Без "мастера" это делается таким образом: первым делом надо снять пропеллеры и отсоединить батарею, далее в разделе "Output" надо сначала поставить галочки "Link" напротив всех моторов, затем галочку "Test outputs", после этого передвинуть все ползунки максимально вправо (так как они связаны, они будут сдвигаться вместе). Теперь нужно подключить батарею, подождать когда регуляторы пропищат и после этого передвинуть ползунки максимально влево. Регуляторы должны ещё раз пропищать и тогда можно выставлять им стартовый газ.
- Там же в разделе "Output" я поставил галочку "Motors spin at neutral output...", но сразу скажу, что это шаг опциональный. При включении этой опции моторы будут начинать крутиться сразу при арминге и не будут останавливаться, если газ сброшен до нуля.
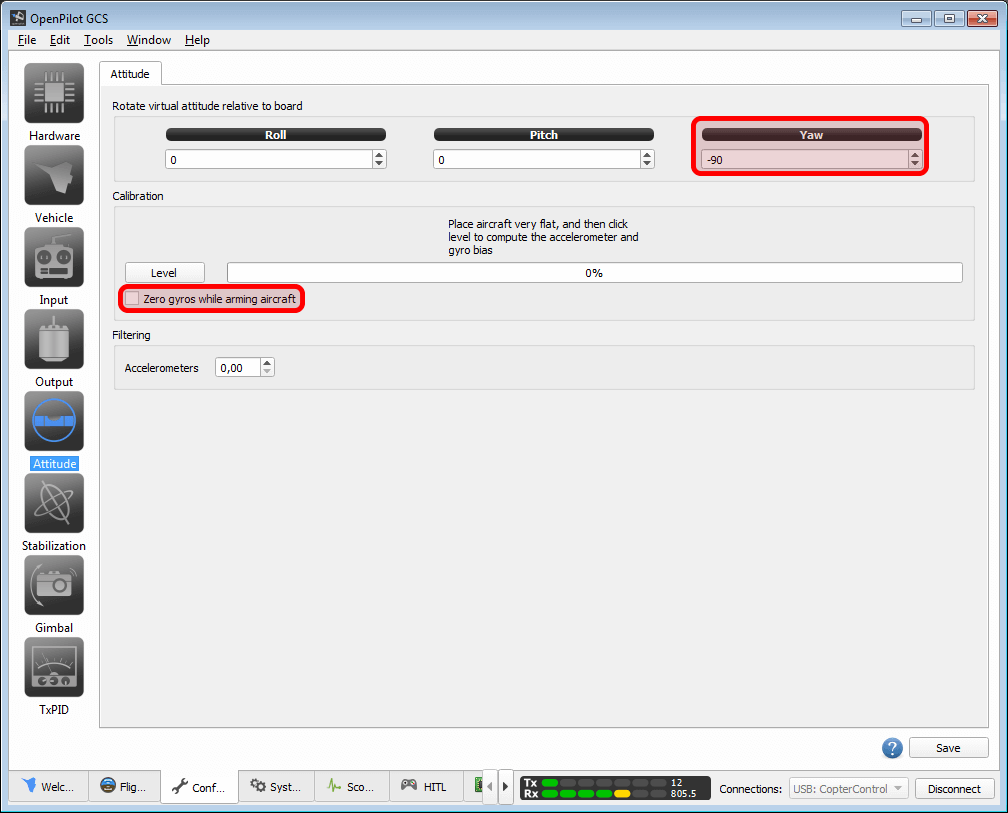
- В разделе "Attitude" я выставил значение yaw -90, так как развернул ПК на 90 градусов по часовой стрелке. Правильность этого параметра можно сразу проверить во вкладке "Flight Data".
- Там же в "Attitude" есть опция "Zero gyros while arming aircraft", на которую стоит обратить внимание. Она позволяет калибровать гироскоп при арминге моторов. Если её отключить, то полётный контроллер каждый раз при старте будет брать усреднённые последние показания гироскопа. При включении этой опции при арминге будет производиться калибровка, но квадрокоптер при этом должен стоять неподвижно (не обязательно идеально ровно).
PID и кривую газа я оставил дефолтными. Это очень индивидуальные параметры: PID учитывают массу, развесовку и технические параметры модели, а кривая газа - личные предпочтения пилота. Настраивать их надо непосредственно под себя. С кривой газа есть такой нюанс, что в любом случае, точка максимального газа (самая правая) должна стоять на 90% (так она и стоит в настройках по умолчанию). Дело в том, что по факту все моторы и все регуляторы на квадрокоптере чуть-чуть разные и при идентичном напряжении выдают немного разное количество оборотов. ПК нивелирует это, где-то чуть повышая обороты, где-то чуть понижая их. Если поставить точку максимального газа на 100%, при полном газе повышать обороты будет некуда и квадрокоптер может уводить в какую-либо сторону. Если же установить эту точно на 90%, "пространство для манёвра" будет всегда.
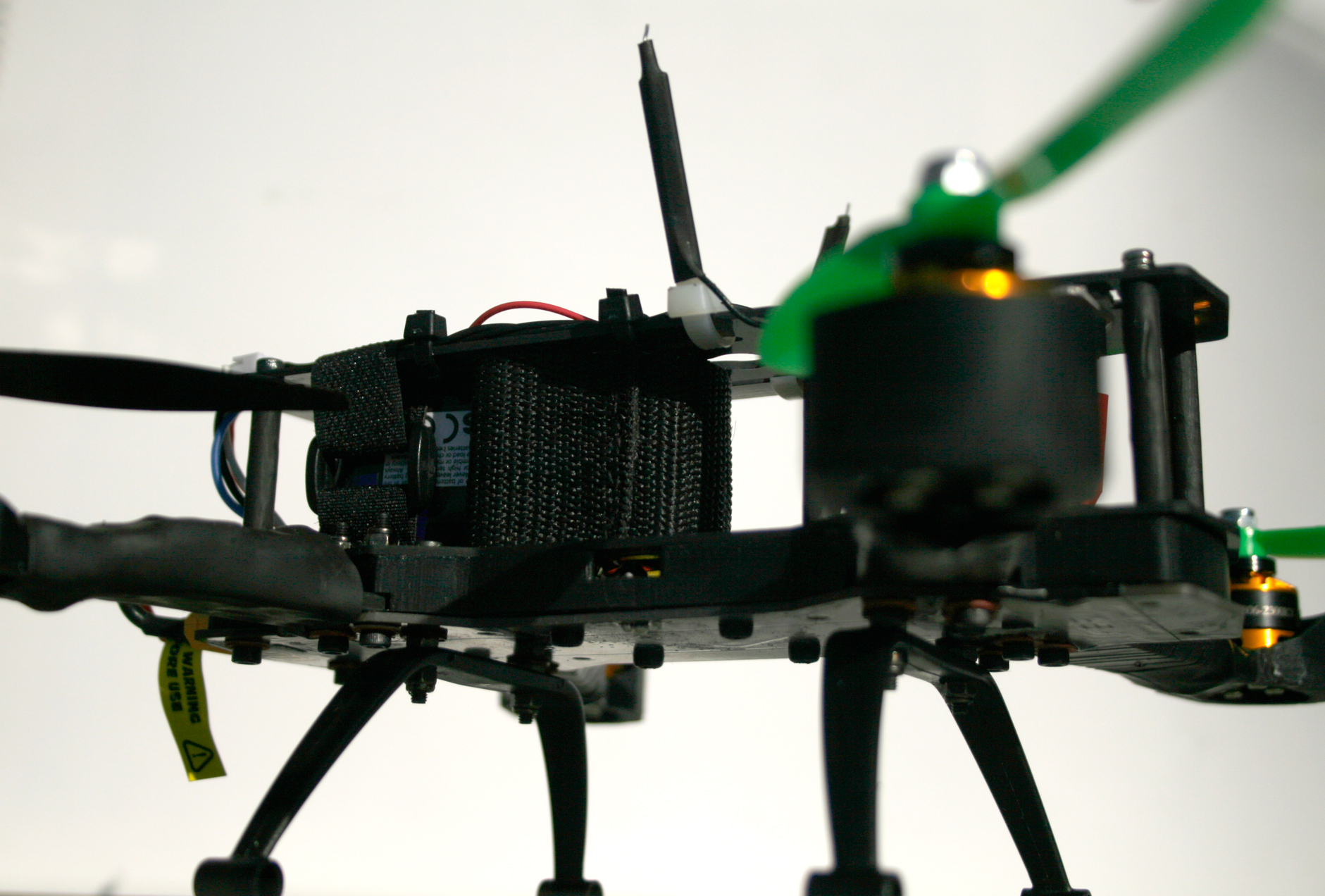
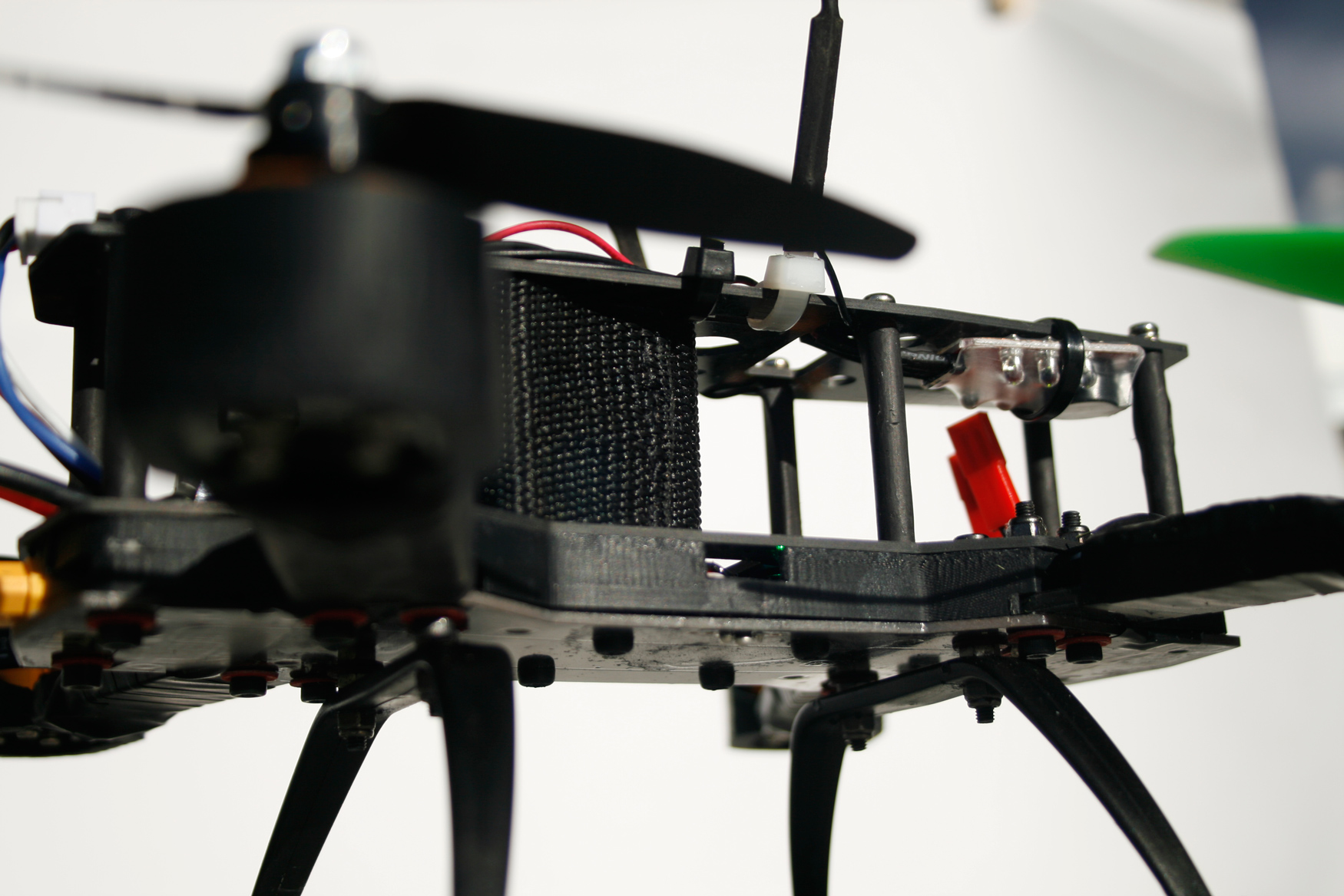
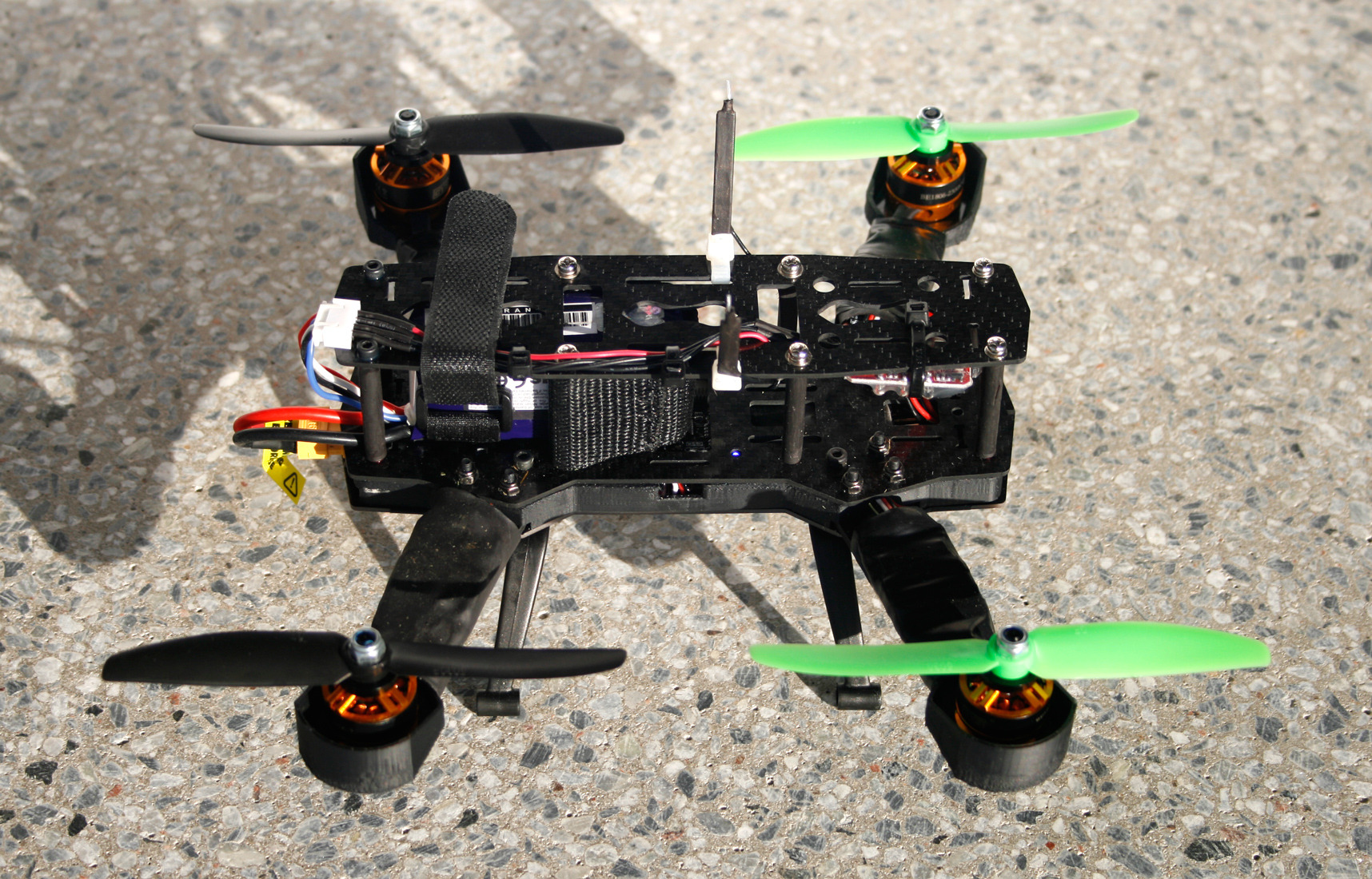
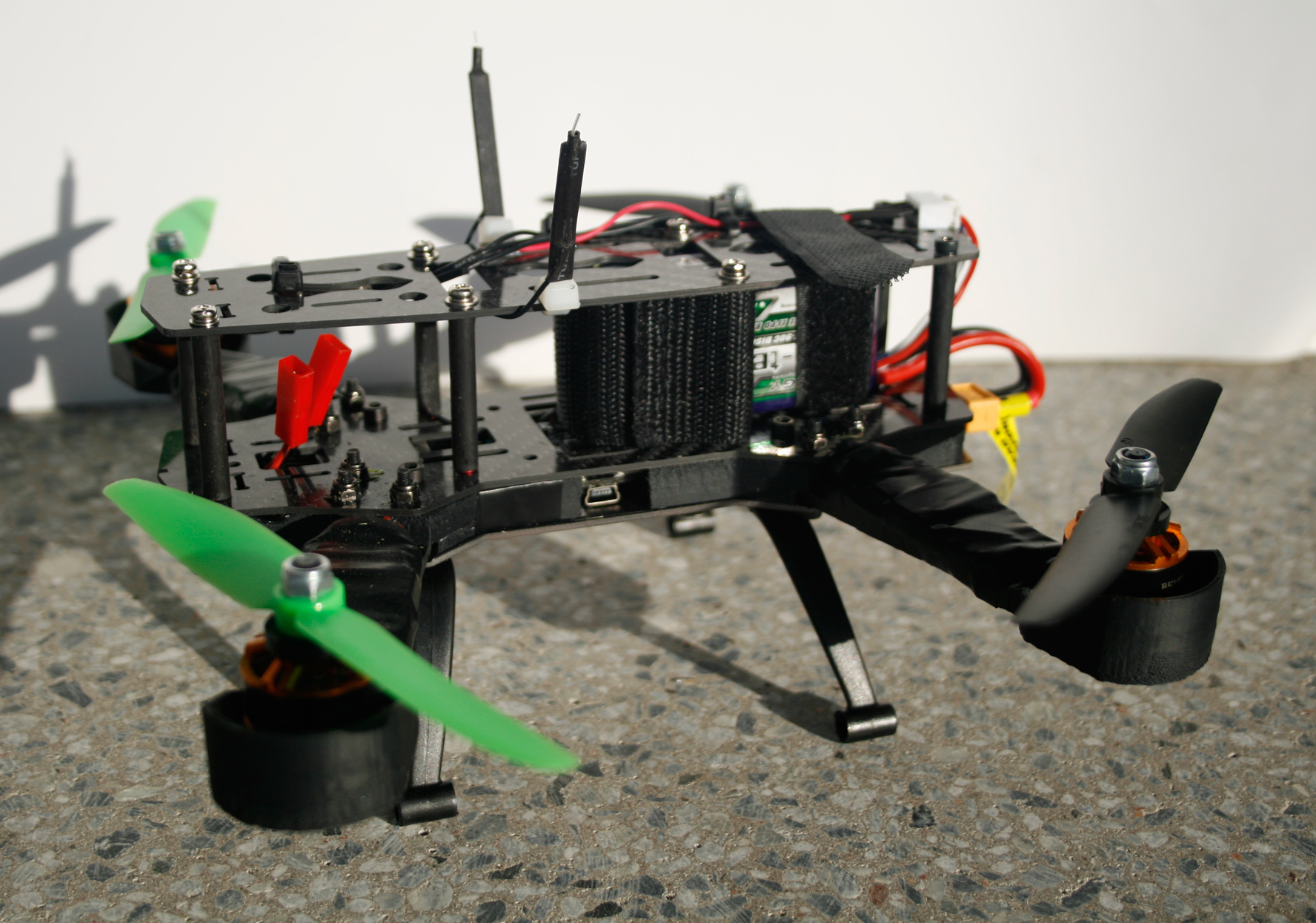
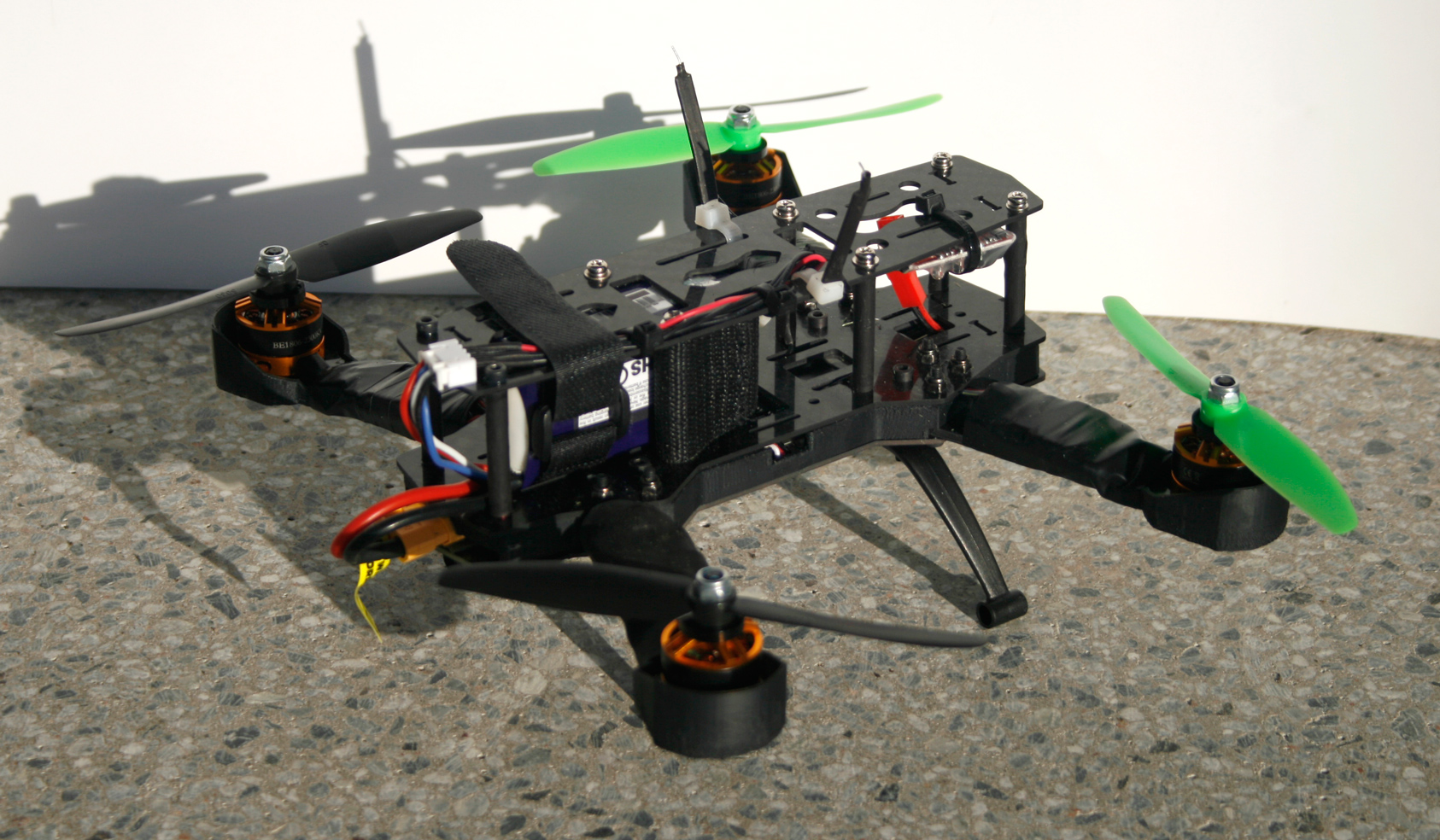
На этом я завершаю вторую часть этой статьи. Квадрокоптер собран и он летает, но надо понимать, что он изначально расчитывался под FPV, а так как этого оборудования пока не установлено, в нынешнем состоянии развесовка квадрокоптера далека от идеальной. Собственно, в третьей части я расскажу об установке FPV и только после этого можно будет затронуть тему настройки PID. Кстати, вес квадрокопрера составил около 360 грамм без батареи. Ниже немного фото.



Знатно накомментили:
Зачем то навешано куча бесполезного пластика, миним осд умеет сама измерять напряжение, на 3s летать скучно и медленно. Статья ни о чем.
Насчёт того, что статья ниочём. Здесь (как и в первой части) я попытался собрать как можно больше теоретической информации, которая, я надеюсь, кому-то поможет при их сборке.