
Сборка квадрокоптера на раме ZMR250 (часть 1) - комплектующие и сборка

Во многих аспектах, данная статья выражает
субъективное мнение автора.
Спорить с ним бесполезно, он упёртый.
Собирать самому или купить готовый?
Первоначально я присматривался к уже готовым моделям. Больше всех понравилась Walkera Runner 250 (обзор от Игоря Рубина). Но почти все готовые модели обладали огромным минусом: плата с полётным контроллером по совместительству была деталью рамы. То есть, если она ломалась при падении (а квадрокоптеры такого класса падают едва ли не чаще всех остальных), то ремонт обходился неоправданно дорого. Да и вообще, общение с Блэйдом научило меня, что проприетарные детали - зло и трата денег. А в случае с Валкерой были ещё и негативные отзывы на форумах (например, это и этот).
Короче, как ни верти, надо было собирать квадрик самому и я начал искать информацию. Оказалось, что статей и обучающих видео много. Правда, многие статьи больше похожи на фото-отчёты с минимумом текста. Из видео в первую очередь попались ролики от Юлиана Гиневского о трёх частях: первая часть, вторая часть и третья, она же заключительная. Ролики очень подробные, тем они и нравятся новичкам вроде меня. На форумах иногда обсуждаются эти уроки и не все из числа умудрённых опытом с ними согласны, но в целом резюмированные высказывания выглядят примерно так: "подбор деталей сейчас уже устаревший, детали выбирались подешевле, получился добротный народный квадрик". Я комплектующие брал почти те же самые, но сейчас, потратив немало времени на чтение форумов, кое-что бы переиграл. О комплектующих, рекомендуемых на момент написания статьи можно узнать здесь. И ещё пара полезных ссылок:
- Поисковик деталей для квадрокоптеров. Удобно, что сразу показывает цены в разных магазинах.
- Drone Configurator - калькулятор конфигурации. Очень забавный инструмент, позволяющий выбрать комплектующие, а потом на их основе отображающий массу, тягу и прочие параметры квадрокоптера. Каталог деталей пока не очень большой, но для каждого товара есть ссылка на магазины, где его можно приобрести.
Подбор комплектующих
На момент, когда все детали были заказаны, а часть уже и получена, появился весьма пользительный FAQ по подбору комплектующих. Там много полезных ссылок, но мало (надеюсь, пока) объяснений "почему именно так, а не иначе".
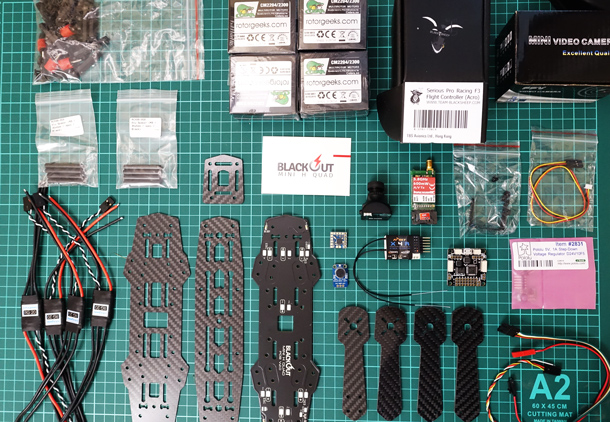
Первоначально я заказал детали непосредственно для самого квадрокоптера, а FPV-оборудование решил заказать и установить позднее (об этом будет третья часть статьи). Итак, мой список комплектующих таков:
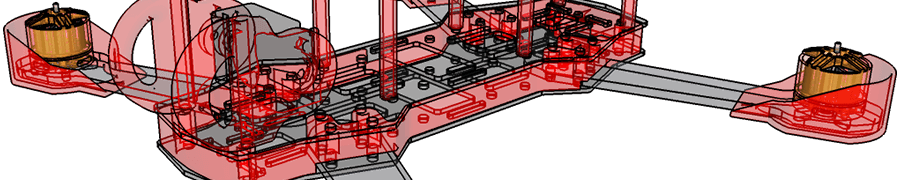
- карбоновая рама ZMR250 и пара запасных лучей (конкретно эти лучи - вариант сомнительный, так как их парафинят за низкое качество), 29€ + €5
- полётный контроллер OpenPilot CC3D EVO (чуть подробнее о полётных контроллерах читайте ниже), 15€
- 4 мотора DYS 1806, 4 * 9€. Они хороши для первого квадрика "на пробу", но всё же я поспешил. Мощности этих моторов хватает только на пропеллеры 5030, на 5040 они уже будут греться. Намного предпочтительнее использовать моторы размера 2204 (1806 и 2204 - это размеры статора мотора: 18мм x 6мм и 22мм x 4мм соответственно), которые обладают большей мощностью. Рекомендуемый вариант - Cobra 2204
- 4 регулятора RCTimer 12A SimonK, 4 * 10€. Для купленных мной моторов они подходят отлично, хотя и большеваты по размерам. А вот для мотора 2204 их силы может быть недостаточно (зависит от пропеллеров), разумнее брать 20А. Вдобавок, новые регуляторы имеют такие функции, как OneShot и активное торможение и имеют более современную прошивку BlHeli вместо SimonK. Также при выборе регулятора надо смотреть, если в названии есть аббривиатура OPTO, значит регулятор не имеет своего BEC'а (регулятора бортового питания) и тогда придётся использовать дополнительный.
- 2 комплекта пропеллеров Gemfan 5x3, 2 * 2€. Для моторов 1806 это оптимальный размер. Опять же, если используете моторы 2204, можно выбрать пропеллеры 5040. На форумах очень хвалят эти пропеллеры. Также не следует покупать трёхлопастные и карбоновые пропеллеры. Первые делают квадрокоптер маневреннее, но очень сложно балансируются. Со вторыми всё ещё сложнее. Во-первых, они достаточно дороги, а учитывая, что пропеллер в 250-м классе - расходник, в итоге полёты выйдут очень накладными. Во-вторых, что важнее, они весьма прочные и при аварии, вместо того, чтобы погасить удар, передадут его дальше. Результатом будет погнутый вал мотора или сломанная рама.
- плата распределения питания Diatone ZMR250 PDB, 6€
- 3S батарея Turnigy nano-tech 1300mAh 3S 45~90C с разъёмом XT60, 16€ (вместе с доставкой). Вообще, такой объём пойдёт только для достаточно спокойных полётов. При более агрессивном пилотаже - 1500-1800. На форумах рекомендуют синие Turnigy и синие или желтые Zippy.
- "пищалка" для батареи, 2€
- разъём XT60 с проводом, 2€
- 2 "фары" (это своего рода дань Walkera Runner 250, передние фары которой мне очень понравились и захотелось сделать нечто похожее), 2 * 3€
- приёмник FrSky D4R-II, 22€ (вместе с доставкой)
- шасси, 4€
Из мелочей понадобилось следующее: пластиковые болтики/проставочки, металлические болтики и гаечки (гайки M5 с нейлоновым уплотнителем и болты M2 x 6мм, M3 x 15мм, M3 x 20мм и M3 x 35мм) и термоусадочные трубки разных диаметров, стяжки для проводов и двухсторонний скотч. Также в обязательном порядке необходимы "синий" Loctite (средней фиксации) и диэлектрелизующий лак Plastik 70.

На самом деле, деталей было куплено больше, но многие не пригодились, так как идеи компановки несколько раз менялись до начала и непосредственно в процессе сборки. В частности, уже после заказа львиной доли комплектующих, подумалось, что использование 3D-печати сильно мне поможет. Таким образом я заказал у 3D-печатников следующие детали:
- проставку для нижней части рамы с местом под разъём XT60 (конкретно детали из файлов Unibody_CC3D.stl и Unibody_CC3D_XT60.stl)
- 4 защитных кожуха для моторов (предотвращают попадание грязи внутрь мотора, правда, конкретно эти кожухи чуть великоваты, так как расчитаны на 2204 моторы)
На момент подготовки статьи, на Banggood'е появились в продаже распечатанные проставки, так что если у вас нет доступа к 3D-принтеру, не всё потеряно.
Подобъём финансы: 178€ за комплектующие (цены округлял до целых в большую сторону) + 35€ за 3D-печать. Мелочи не из списка и расходники не учитываю.
Naze32 или CC3D?
Перед тем как приступить к сборке, как и обещал, немного о полётных контроллерах. Наиболее популярными и массовыми для 250-х квадрокоптеров являются CC3D и Naze32. Вкратце, вот чем они отличаются:
- проект OpenPilot (ПО для CC3D) фактически закрыт, а команда разделилась на два отдельных проекта: Tau Labs занимается новыми OpenPilot Revolution, LibrePilot - более старыми CC3D
- поддержка CC3D прекращена
- проект Cleanflight (ПО для Naze32) активно развивается и имеет бОльшую аудиторию, следовательно, легче найти настройки под похожий конфиг коптера
- CC3D можно перепрошить на Cleanflight, но места на чипе впритык и новые версии (1.10 бета) туда просто не влезают. Сам я по пока не планирую этого делать, но вот пара видео-уроков по установке и настройке
- в Naze32 есть контроль заряда батареи и "пищалка"
- у Naze32 есть бародатчик для удержания высоты, но, насколько я понял, на 250-х квадрокоптерах его использование сомнительно
- Naze32 хорошо работает с телеметрией (например, для Taranis вообще не нужно никаких дополнительных датчиков). С CC3D, если хочется видеть не только время полёта и заряд батареи, нужно искать кастомную прошивку для OSD, которая не факт что дальше вообще будет поддерживаться
- CC3D не может работать одновременно с OneShot и PPM-приёмниками. Это кажется нелогичным, так как регуляторы и приёмник никак не связаны между собой. Всё дело в процессоре CC3D, где недостаточно таймеров чтобы обрабатывать столько каналов приёмника и одновременно с этим управлять регуляторами с большой частотой
Здесь можно почитать подробнее о различиях между Naze32 и CC3D, но и так видно, что Naze32 предпочтительнее. Так почему же я выбрал CC3D? Из-за цены. Оригинальная Naze32 в самой "бедной" версии (минимальное количество датчиков) в 2 раза дороже CC3D, а с "полным фаршем" - под 50€. Есть дешёвый клон под названием Flip32, но в его адрес много нареканий на форумах. В первую очередь жалуются на то, что USB-разъём для прошивки отваливается от платы. Поэтому для себя я решил: появится более доступная версия Naze32 или лишние деньги - куплю, а пока буду летать на CC3D.
Сборка квадрокоптера
Сборка квадрокоптера - процесс творческий. Вариантов компоновки не счесть, так что можно поднапрячь своего инженерного гения. В любом случае, перед началом надо запомнить несколько важных вещей:
- Карбон проводит ток. Так что всё надо хорошо изолировать, чтобы нигде ничего не замыкало на раму.
- Всё, что выступает за пределы рамы, при аварии вероятнее всего, будет сломано или оторвано. В данном случае речь идёт, в первую очередь, о разъёмах. Провода тоже могут быть перерублены винтом, так что и их надо прятать.
На одном из форумов я увидел такую фразу:
впихнуть невпихуемое - всегда было романтикой авиастроения
И с тех пор она не выходит у меня из головы. Дело в том, что рама ZMR250 спроектирована таким образом, что регуляторы крепятся на лучах, вся остальная электроника помещается внутрь рамы, а батарея располагается на верхней пластине "снаружи" рамы.
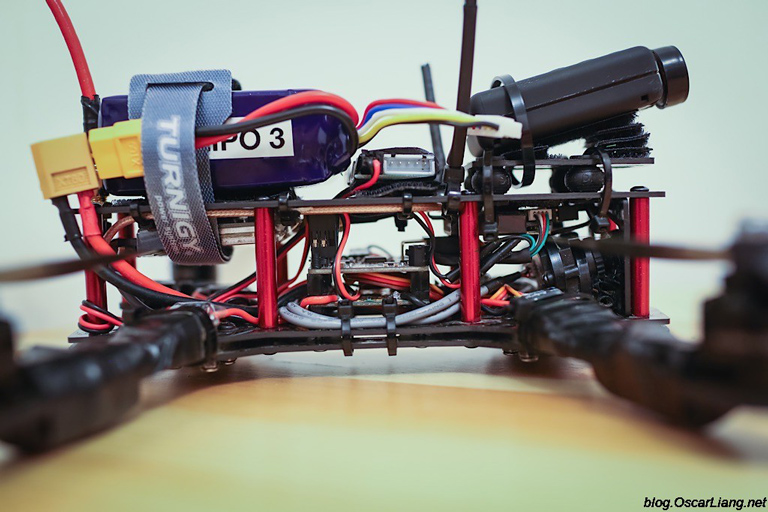
Фото OscarLiang.net
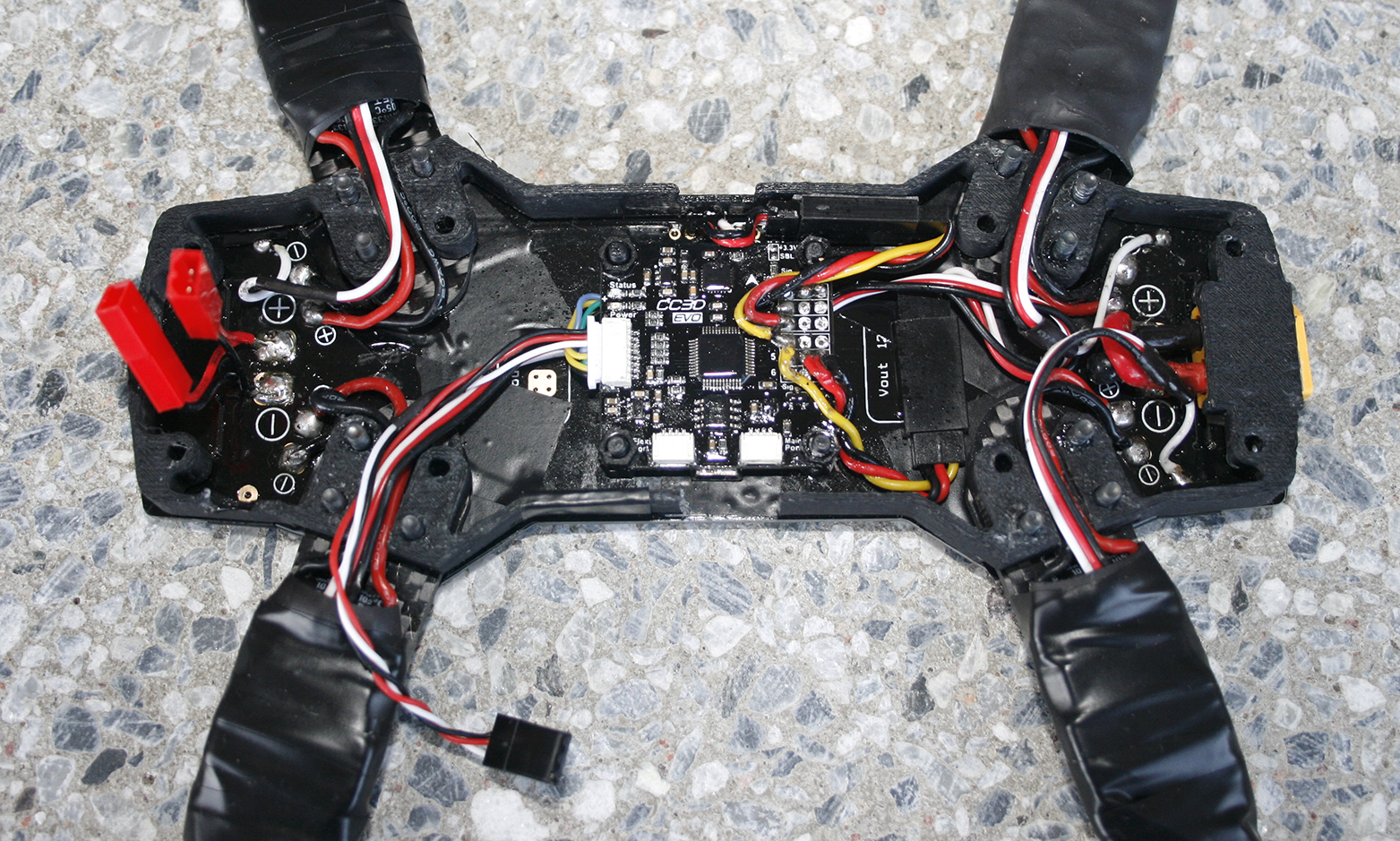
Но при такой компоновке, при падении батарея с вероятностью, стремящейся к 100%, отвалится и, скорее всего, повредится. Поэтому я отошёл от такого расположения деталей и решил поместить электронику вниз рамы, между двух пластин, фиксирующих лучи. У кого нет доступа к 3D-принтеру, используют металлические (чаще всего латунные) проставки, ну а я для этого распечатал проставку. Дополнительным её плюсом является место для разъёма XT60. Я вообще сторонник того, что разъём питания надо фиксировать на плате, а не оставлять провод болтаться, так как в случае аварии его может легко перерубить пропеллером.
И только приложив к раме проставку, я понял, насколько невпихуемое мне придётся впихнуть. Началась своего рода борьба за миллиметры и на алтарь компактности легло многое. Сразу стало ясно, что все контакты на полётном контроллере для подключения регуляторов придётся удалять и паять провода напрямую. Здесь очень полезной оказалась плата распределения питания Diatone. Она позволила сэкономить места за счёт проводов, но у неё есть несколько неприятных нюансов. Во-первых, в сочетании с карбоновой рамой (мой случай), при закручивании болтиков можно поцарапать ими лак на плате, что может привести к короткому замыканию (примерно так). Жалоб на это было действительно много, так что новые версии платы поставляются вместе с картонными шайбами, которые надо ставить под болты. Во-вторых, BEC'и на этой плате весьма посредственные и из-за особенности конструкции сильно греются, так что многие пользователи их меняют. Вдобавок, токи они выдают слабые - 0,5А. Также были случаи, когда при запуске моторов происходил скачок напряжения на 5-вольтовом BEC'е и то, что к нему подключено, сгорало. Третьим моментом является то, что отверстия для болтов на этой раме не соответствуют оным на деталях рамы. Устраняется надфилем.
Короче, на Diatone ZMR250 PDB я смотрел с опаской. Её BEC'и я демонтировал сразу. Благо везде, кроме полётного контроллера, можно было использовать 12В напрямую с батареи. На нижней стороне платы расположены контакты для подсветки, но я не планировал их использовать, так что следовало заизолировать их, иначе могут "коротнуть", если сесть, например, на мокрую траву. Я покрыл плату лаком Plastik 70 в несколько слоёв, предварительно прикрыв изолентой все нужные мне контакты. Не всем он нравится (например, потому, что препятствует охлаждению), но никакого другого изолирующего средства у меня не было. В любом случае, хорошая изоляция крайне важна. Здесь можно узнать, какие ещё варианты изоляции плат существуют.
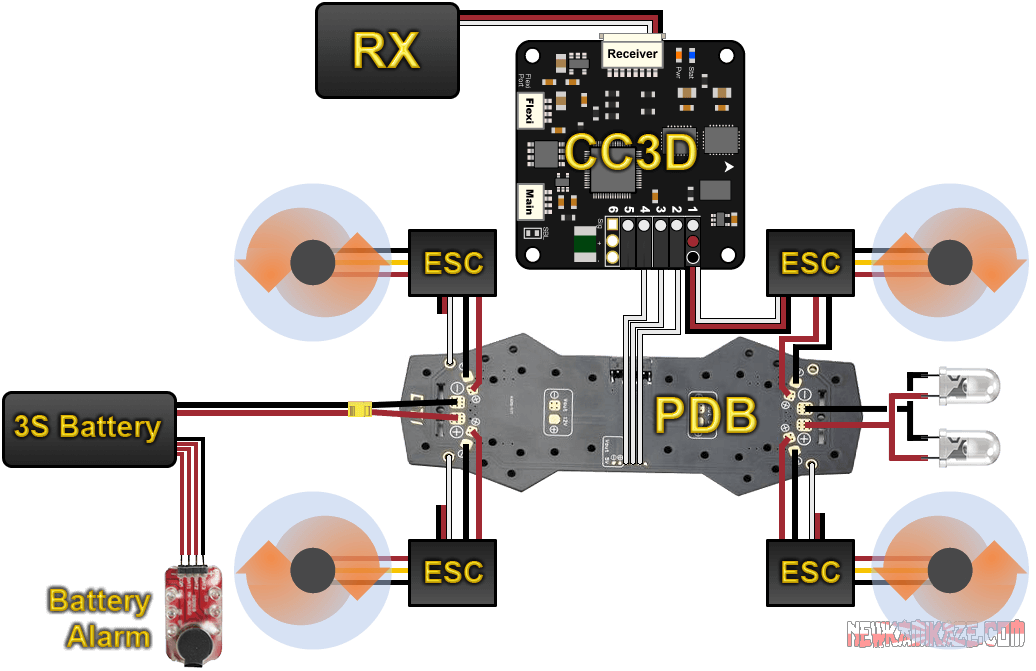
По проводке вырисовывалась такая схема: все регуляторы питались напрямую от батареи, от первого регулятора к полётному контроллеру идут все три провода управления (для обеспечения питания ПК), от остальных регуляторов - только сигнальный (белый) провод. Надо сразу понимать такой момент: BEC первого регулятора будет питать ПК и через него ещё и приёмник. Регулятор RCTimer 12A SimonK выдаёт 2А, чего вполне достаточно. Если силы тока недостаточно, то питающий регулятор может отключаться во время полёта, что приведёт к аварии. "Пищалка" для батареи, как и положено, будет крепиться к балансировочному разъёму.
Часто на пятый канал ПК ставят ещё одну "пищалку", (такую), которую можно активизировать с пульта, если квадрокоптер потерялся. Хотя сразу надо сказать, что не очень стоит на неё надеятся, так как при большинстве аварий (особенно, если батарея расположена сверху рамы, а не внутри, как у меня), как уже писалось выше, батарея отлетает, квадрокоптер обесточивается и все "пищалки" перестают работать. Для этого случая у меня ещё есть GPS-трекер. Тем не менее, вот пара ссылок, которые могут помочь при установке "пищалки" и настройке передатчика:
- Setting up a Discovery Buzzer with Taranis and FRSKY D4R-II on CC3D
- видео mr. FlyMode (на русском)
- видео Painless360
- видео FunFly FPV
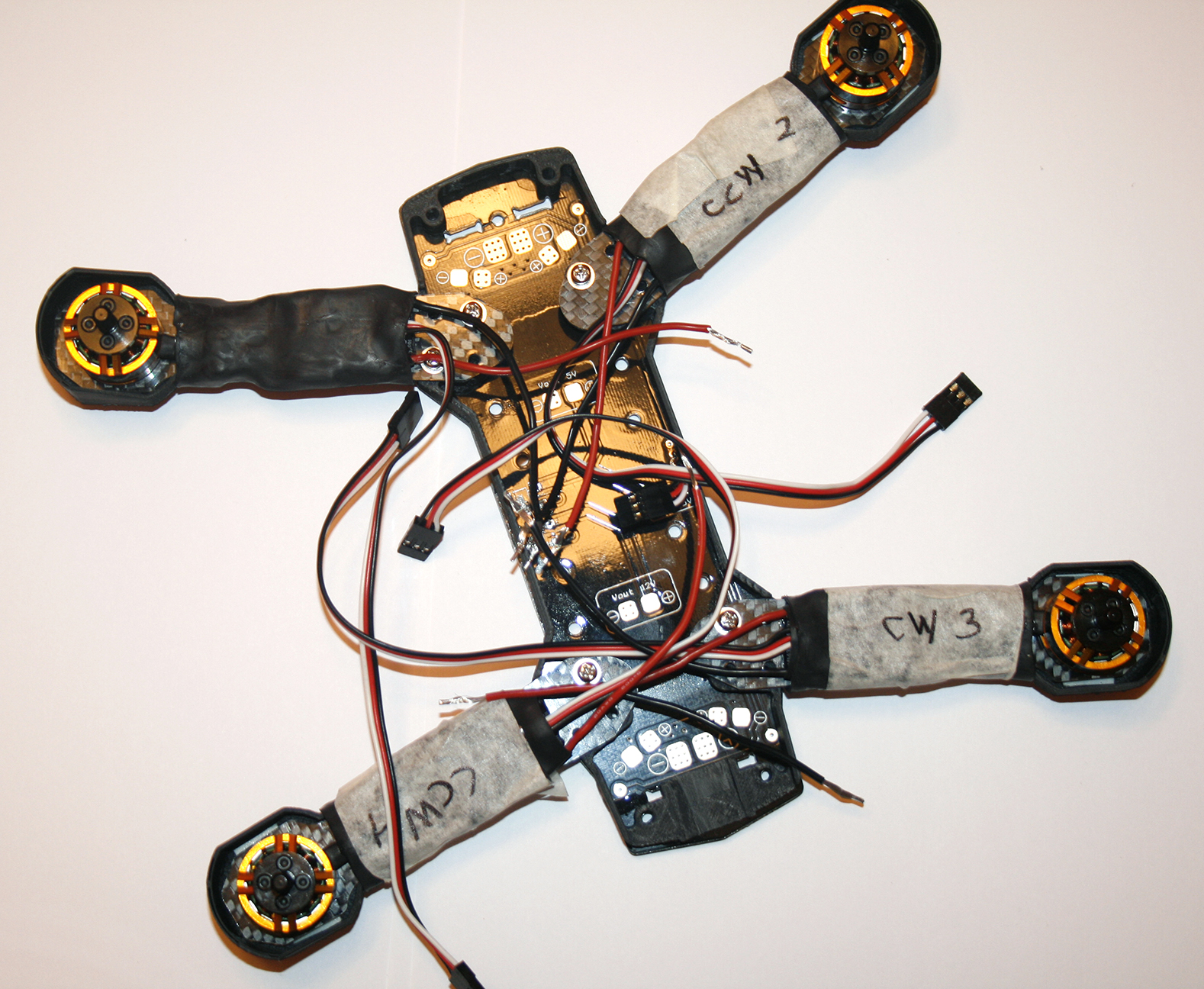
Теперь непосредственно сборка. Она очень хорошо показана у Юлиана, так что я буду опираться на это видео. Итак, начал я с самого простого - моторов. Сначала я удалил с лучей недоразумение, выполняющее роль шасси, а затем прикрутил адаптеры пропеллеров, отбалансировал моторы, и припаял их провода к регуляторам, сохраняя необходимое направление вращения (2 мотора по часовой стрелке и 2 - против). С регуляторами на прошивке BlHeli направлением вращения можно не заморачиваться, так как его можно изменить программно. Провода между моторами и регуляторами я старался делать как можно короче. Во-первых, из соображений компактности, а во-вторых, длинные провода переменного тока создают достаточно большие шумы.
После этого я закрепил болтами на лучах защитные кожухи и моторы (здесь и далее все резьбовые соединения скрепляются Локтайтом). Для моторов я использовал не штатные болтики, а M2 x 6мм. Дело в том, что 7мм болтики из комплекта могут повредить изоляцию проводов и замкнуть их на раму.
Также имеет смысл приклеить по кусочку двухстороннего скотча снизу на каждый луч в месте крепления мотора. Во-первых, он защитит подшипник мотора от пыли. Во-вторых, если по какой-то причине один из болтиков открутиться, он не выпадет при полёте и не потеряется.
Отдельно хочется сказать про крепление регуляторов: где и чем? Их можно закрепить на луче и под ним. Я выбрал первый вариант, так как мне кажется, что в этом положении регулятор более защищён (это мои домыслы, не подтверждённые практикой). Вдобавок, при креплении на луче, регулятор отлично охлаждается воздухом от пропеллера. Теперь о том, как закрепить регулятор. Способов много, наиболее популярный - двухсторонний скотч + одна-две стяжки. "Дёшево и сердито", к тому же демонтаж трудностей не доставит. Хуже то, что при таком креплении можно повредить плату регулятора (если ставить стяжку на неё) или провода (если крепить на них). Так что я решил крепить регуляторы термоусадочной трубкой (25мм) и запаял их вместе с лучами. Есть один нюанс: сам регулятор тоже должен быть в термоусадке (мои в ней и продавались), чтобы не соприкасаться контактами с карбоном луча, иначе - КЗ. Получилось симпатично:


Забегая вперёд, скажу, что такой вариант крепления хорош только на один раз. Если по какой-то причине пришлось срезать термоусадку, новую уже не одеть, так как с одной стороны регулятора уже припаян мотор, а с другой - PDB. В итоге я вышел из положения закрепив регулятор к лучу двухсторонним скотчем и обмотав их обоих изолентой по всей длине регулятора.
Далее я припаял провод питания к PDB и закрепил проставку и лучи. Изначально хотелось поставить лучи поверх проставки, но такой вариант затруднял проведение проводов, так что пришлось ставить под неё. Маленькую деталь, зажимающую разъём XT60 (из файла Unibody_CC3D_XT60.stl) я не стал ставить, так как она была великовата. Вместо этого я приклеил разъём к большой проставке двухсторонним скотчем.
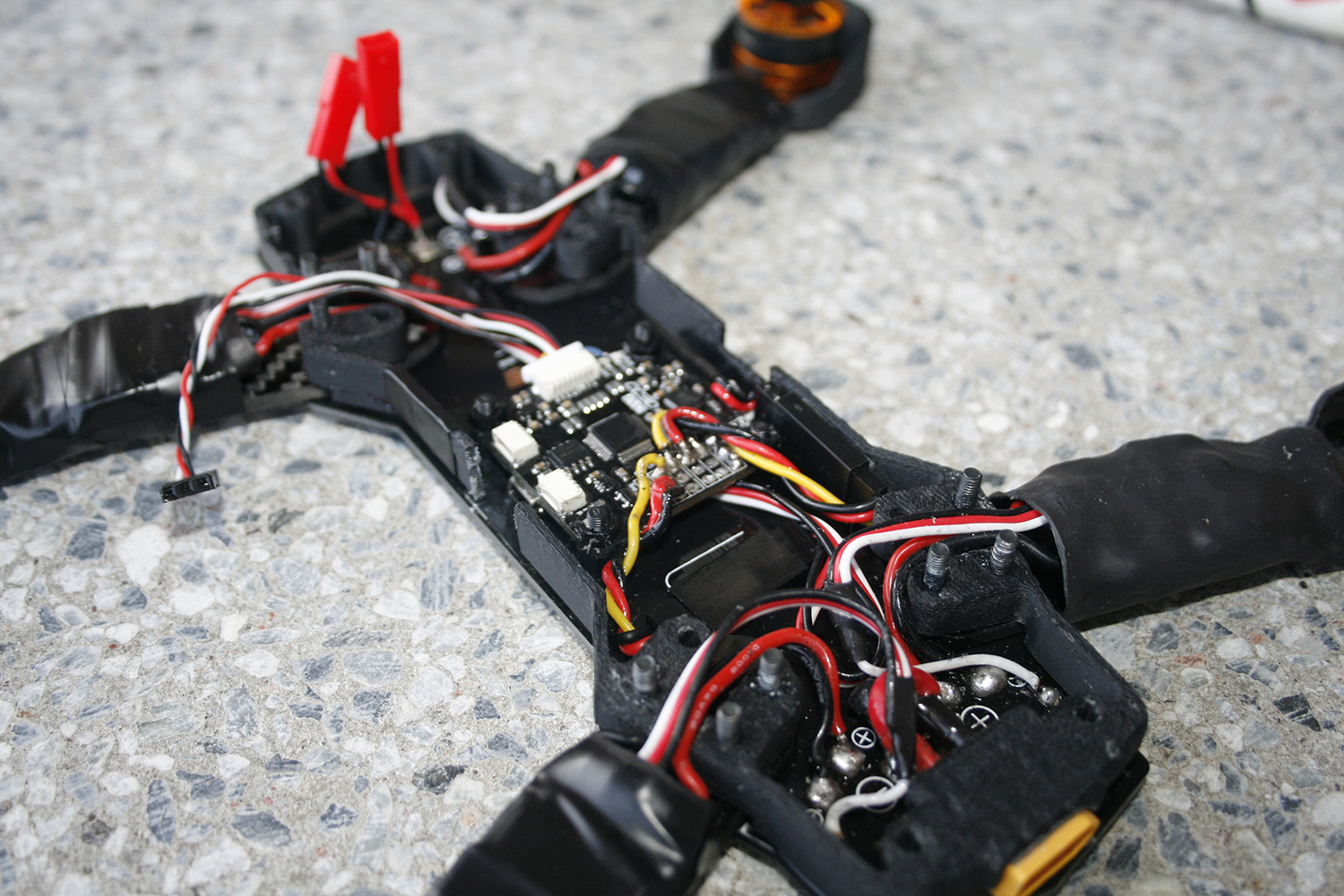
После этого можно было паять все необходимые провода от регуляторов к плате распределения питания. Также я сразу вывел два 2-контактных разъёма с питанием 12В (через них будут питаться "фары" и видеопередатчик для FPV) и припаял 3-контактный разъём-"маму" к дорожкам, идущим к регуляторам (2-й, 3-й и 4-й регуляторы). Затем я покрыл верхнюю сторону платы изолирующим лаком и на всякий случай наклеил изоленту в место соприкосновения с лучами. С пайкой PDB было покончено.
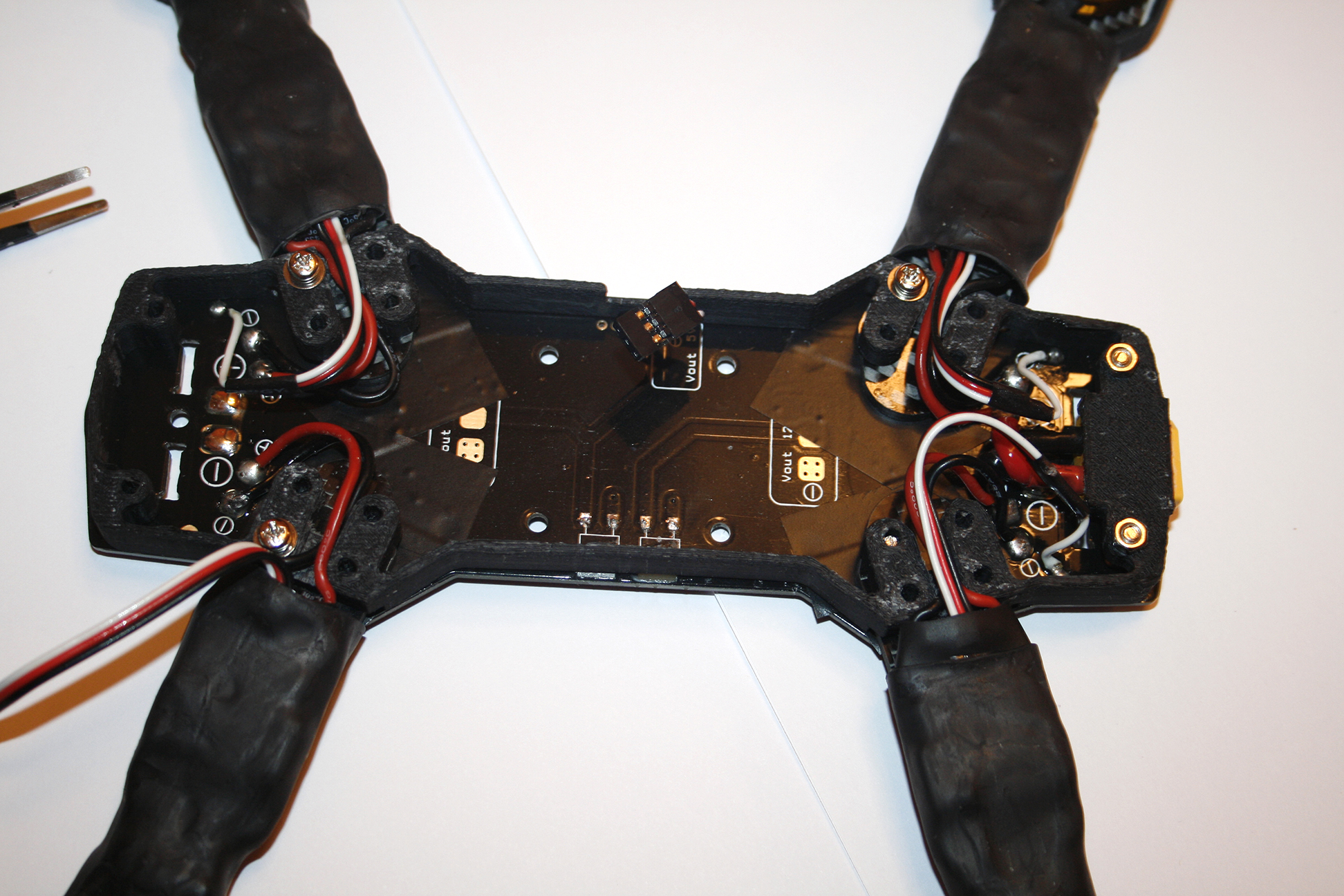

С полётным контроллером я разобрался быстро: отпаял все контакты для регуляторов и припаял вместо них два 3-контактных разъёма-"папы": на 1-й канал (для обеспечения питания ПК) и на сигнальные контакты 2-го, 3-го и 4-го каналов. После этого я опять же покрыл полётный контроллер лаком в несколько слоёв, предварительно прикрыв изолентой все разъёмы. Чтобы провода в месте спайки с платой не отломались от вибраций, разумно нанести немного термоклея. Когда лак высох, я взял 4 нейлоновые проставки, укоротил их до минимально возможного размера и жестко закрепил на них полётный контроллер к PDB.
Некоторые моделисты пытаются демпфировать его специальными площадками (в моём случае она шла в комплекте с ПК) или пено-скотчем ради уменьшения количества вибраций, получаемых ПК. На форумах не советуют этого делать, так как очень трудно настроить фильтрацию частотных помех, эти помехи просто не доходят до контроллера и ситуация только ухудшается. Лучшим подходом является жесткое крепление ПК и использование программной фильтрации (если это возможно). Кроме того, сам гироскоп имеет встроенный низкочастотный фильтр.
Так же надо сразу подумать о том, что подключать полётный контроллер к компьютеру придётся неоднократно и каждый раз разбирать для этого раму - верх непрактичности. Следовательно, надо обестпечить доступ к USB-разъёу контроллера. Мне для этого пришлось развернуть ПК на 90 градусов (чтобы USB-разъём оказался по левому борту) и сделать прорезь в проставке.

Следующим этапом стало подключение приёмника. На самом деле, изначально я купил FrSky V8FR-II, но чтобы он поместился внутрь проставки пришлось бы убирать у него корпус и отпаивать контакты. В итоге я решил, что разумнее будет заказать приёмник, который поместится без лишних манипуляций - FrSky D4R-II. Ещё одним его плюсом является возможность использования протокола PPM (фазо-импульсной модуляции), в то время, как с FrSky V8FR-II - только PWM (широтно-импульсная модуляция). Плюсами PPM-подключения являются меньшее количество проводов (всего три, так как используется только один канал) и 8 каналов (в режиме PWM приёмник FrSky D4R-II имеет только 4 канала, а этого недостаточно). Минус - задержка сигнала, хотя не всякий пилот её заметит, а начинающий и подавно.
Если говорить о задержке сигнала, то у протоколов PPM, PWM и сателлитов Spektrum обновление данных происходит каждые 22мс. Гораздо быстрее работает протокол S.Bus. Его время обновления составляет всего 7мс. Вдобавок, протоколы PPM и PWM требуют дополнительного декодирования в контроллере, так что их реальная задержка - это время обновления + время декодирования. В итоге, для PPM задержка составляет ~88мс, так как используется скользящее среднее по четырем сэмплам. Кроме того, как писалось выше, на CC3D OneShot работает только при подключении PPM или S.Bus и это тоже следует помнить. Здесь можно прочитать подробнее о разных протоколах подключения.
Подключение приёмника полностью описано в официальной документации, в этой статье либо в этом видео. Так как я использую PPM, но не использую OneShot, мне нужно подключать лишь один 3-контактный разъём (№1 на фото ниже) к 1-му каналу приёмника. Также надо установить джампер-перемычку на сигнальные контакты 3-го и 4-го каналов, чтобы активизировать PPM.
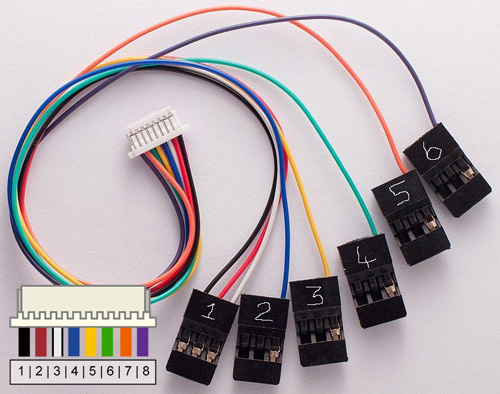
Перед подключением обязательно надо проверить расположения проводов питания на 8-контактном разъёме кабеля, который идёт вместе с CC3D. Так как это китайское производство, бывали случаи, когда провода меняли местами и при включении приёмник сгорал. Правильное расположение такое: слева (1-й контакт) - чёрный провод ("минус"), справа (2-й контакт) - красный ("плюс"). Все остальные провода я отрезал и заизолировал. Сам приёмник я закрепил двухсторонним скотчем, но не к нижней, а к средней плате рамы. В этом случае я могу намертво закрепить антенны приёмника, а при разборке квадрокоптера просто отсоединять кабель от приёмника. Антенны я вывел по стойкам рамы на самую верхнюю плату, где закрепил на стяжках (как в видео Юлиана). Все стойки (с антеннами и без) я для красоты запаял в термоусадку (5мм).
Идея, пришедшая мне в голову уже после сборки: перевернуть приёмник и приклеить его так, чтобы светодиоды и кнопка F/S были видны в прорезь пластины рамы. В этом случае приёмник можно перебиндить без разборки квадрокоптера.
Кстати, так как стойки выполнены из достаточно мягкого алюминия, штатные болтики "съедают" резьбу за несколько разборок. Поэтому я использовал более длинные 15мм болтики.

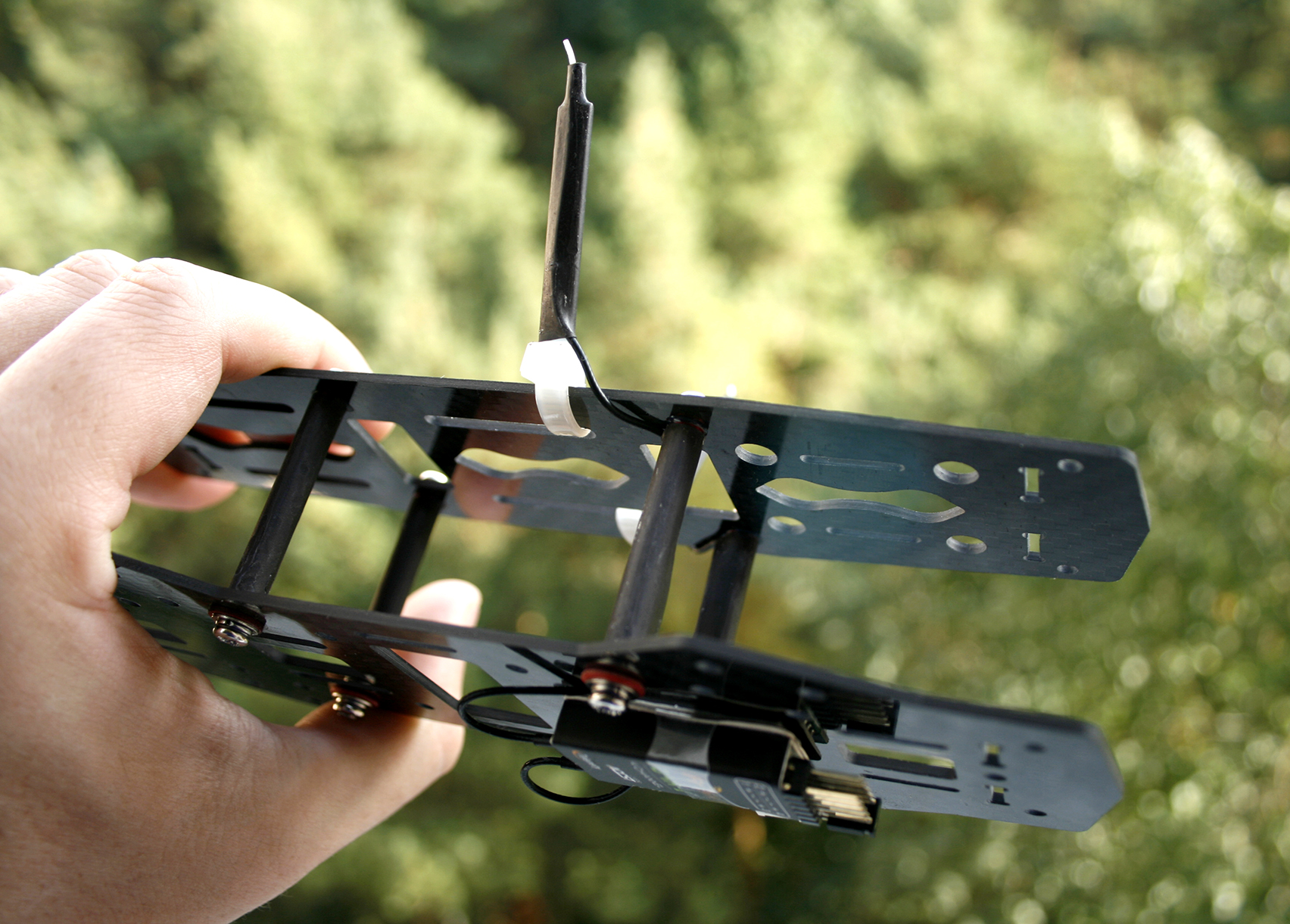
Надо сразу понимать, что внутреннее расстояние между стойками 25-27 мм и батарея влезет туда только боком. Если такой вариант вас не устраивает, можно просверлить новые отверстия для стоек и сместить к краям. Подробнее об этом рассказано в этом видео. Впрочем, можно отверстия не сверлить, а использовать те, которыми крепятся лучи. В этом случае сверху рамы придётся ставить не штатную, более узкую пластину, а такую же, как и в середине (в моём случае она как раз свободна), а заднюю пару стоек не ставить вообще. Пример на фото ниже:

Теперь необходимо забиндить приёмник и настроить на нём failsafe. Как это сделать и как вообще производить самое первое подключение квадрокоптера к батарее, читайте в следующей части. Когда всё это сделано, можно произвести заключительную сборку рамы. Нижнюю половину (PDB с лучами и проставкой) я скрутил с верхней (средняя пластина рамы с приёмником, соединённая через 4 алюминиевые стойки с верхней) болтами. На каждый луч пошло по три болта M3 x 20мм и одному M3 x 35мм, на которых я также закрепил шасси. Кстати, многие пилоты вообще не ставят шасси. Мне же кажется, что без них квадрокоптер имеет несколько незавершённый вид, так что я их поставил.

Осталось поставить 4 последние алюминиевые стойки. Для этого я сверху использовал болты M3 x 20мм, а снизу M3 x 35мм, так как они идут насквозь через всю нижнюю часть рамы. Как и две предыдущие, эти стойки я заранее заплавил в 5мм-термоусадку.
Квадрокоптер практически готов, осталось несколько мелочей. "Пищалку" для батареи я закрепил на самой верхней пластине, но это временная мера. Позднее, при установке FPV-оборудования, я её переставлю.
Как я писал выше, батарея у меня будет располагаться внутри рамы, что должно защитить её при авариях. У такого расположения есть лишь один серьёзный недостаток: при фронтальном столкновении, батарея по инерции уходит вперёд, сметая и ломая всё на своём пути (в первую очередь полётную камеру). Самый простой способ защиты от этого, который пришёл мне в голову - капроновый ремешок (такие часто используют на рюкзаках), пришитый к стойкам рамы. Он совсем не растягивается, вдобавок, зная заранее размер своих батарей, можно оптимально отрегулировать длину этого ремешка. Честно говоря, не знаю насколько действенным окажется этот способ, хочется испытать его как можно позже.
Вероятно, вы обратили внимание, что "фары" остались неиспользованными. Я долго думал, как и где их крепить, учитывая, что они сильно греются. В итоге оптимальным вариантом было крепление их рядом с курсовой камерой, так что к ним я вернусь в следующей статье, где поделюсь опытом выбора и установки FPV-оборудования.
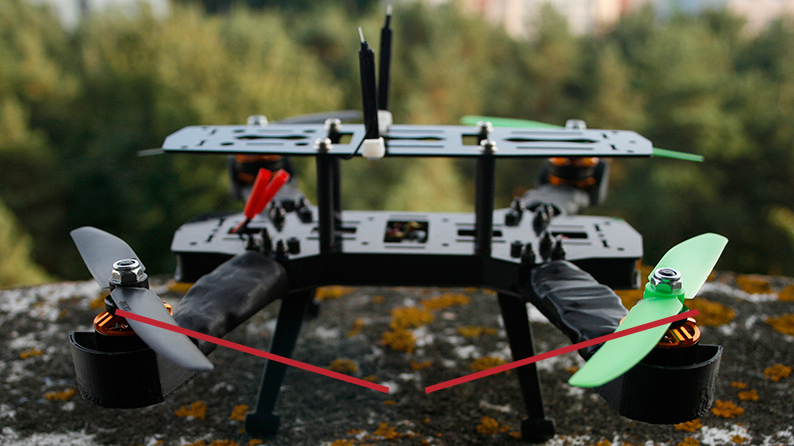
Последнее, что осталось - закрепить пропеллеры. Тут тоже есть нюанс. В комплекте с моторами DYS 1806 идут красивые и удобные гаечки-конусы. К сожалению, резьба на всех адаптерах в одну сторону, а это значит, что две гайки у нас будут самозатягивающимися, а две - наоборот будут постоянно стремиться открутиться. Поэтому разумнее вообще отказаться от штатных гаек и использовать обычные гайки M5 с нейлоновым уплотнителем, предотвращающим откручивание. Кстати, гаек этих лучше купить с запасом, так как пропеллеры будут ломаться часто, откручивать гайки тоже придётся часто и уплотнители будут стираться. Также важно не перетянуть гайку, так как она металлическая, а сам адаптер алюминиевый, а значит ощутимо мягче.
Чтобы не перепутать какой пропеллер куда ставится, есть простой способ: если смотреть на квадрокоптер сбоку (любого), ближайшие к вам лопасти должны быть скошены к центру. Ну и вдобавок надо помнить, что одинаковые пропеллеры ставятся по диагонали.
Теперь необходимо настроить полётный контроллер. Как это сделать, читайте в следующей части.


Знатно накомментили:
Развесовка на управлении не сказалась? Квад не стал "тупее" или наоборот - более "рыскающим" из-за понижения Ц.Т.?
Насчёт развесовки и её влияния на управление ничего не скажу. Я и так-то пилот не очень, а этот квад пробыл у меня очень недолго. Сейчас я совсем не летаю (со временем проблема), а до этого летом иногда 180-го выгуливал. Но там другой квад и другая развесовка.