
Сборка квадрокоптера на раме RoboCat (часть 5) - выдержки из бортового журнала

- Часть 1 - комплектующие
- Часть 2 - сборка
- Часть 3 - пересборка на SPRacingF3
- Часть 4 - установка и наcтройка iNAV
- Фотогалерея
Мой RoboCat с iNAV меня покинул. Расставался я с ним с сожалением и потому уже заказал комплектующие для нового старого проекта, который тоже будет на этой прошивке. Данная статья - это некий отчёт о первых полётах и о том, какой "допилинг" я сделал на их основе. Частично эти изменения уже отражены в статье по настройке. Здесь же я опишу, почему именно я их сделал.
Во многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.
Изменения конструкции
Чего греха таить, сборка была продуманной, так что все изменения данного рода - необязательные улучшения хорошего. ПК я поставил на специальные демпферы от Realacc, а красивую "светомузыку" заменил на минималистичную пластину с 4-мя диодами. Теперь никаких красот, подсветка сигнализирует исключительно служебные вещи - состояние GPS и батареи. Изначально хотелось показывать полётные режимы, но, как оказалось, в iNAV данная фича не работает. Сообщил автору прошивки и он открыл bug report. На момент написания статьи проблема не решена.
-

-
 Защита моторов.
Защита моторов. -
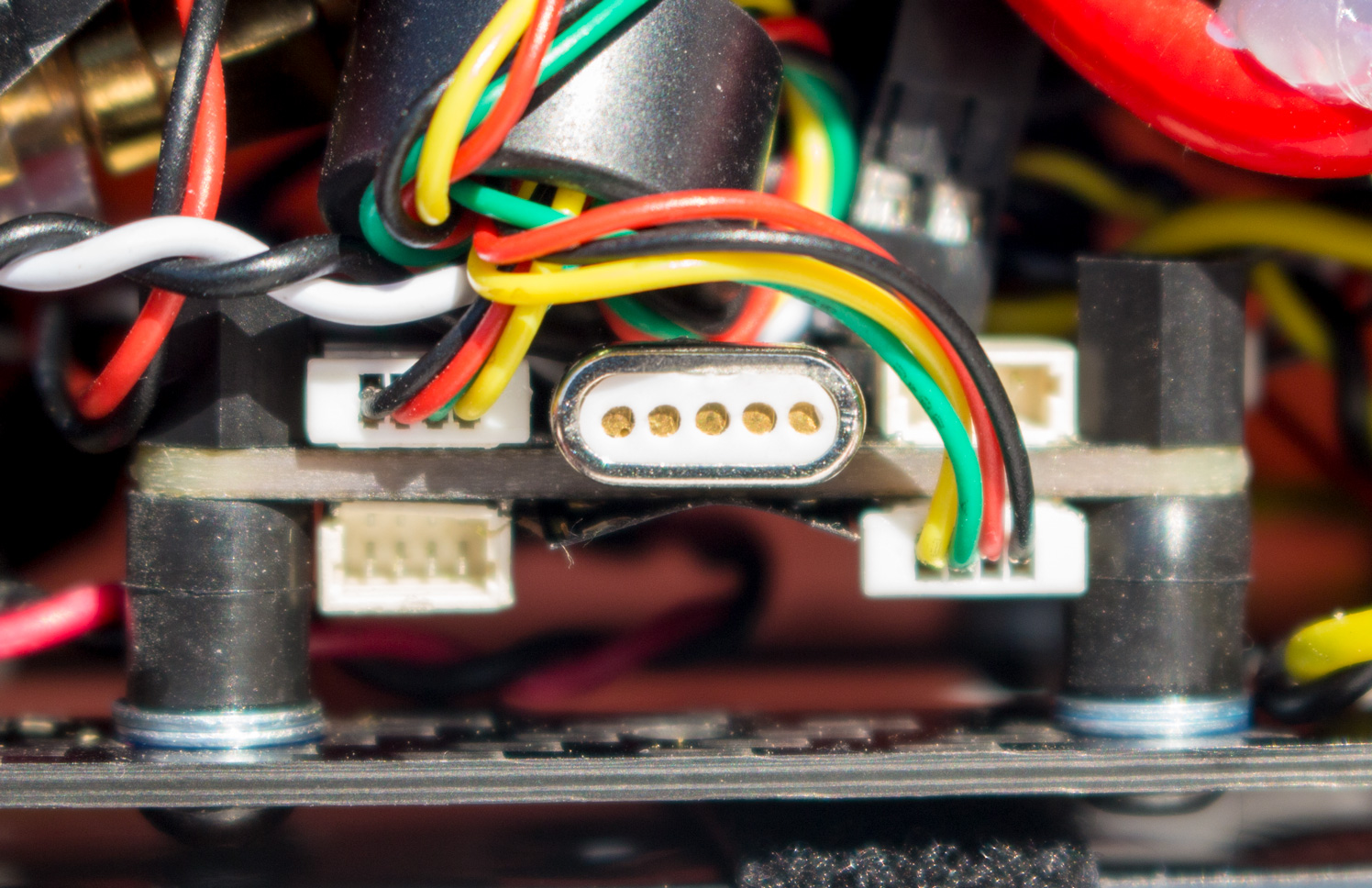
 Полётный контроллер на резиновых демпферах.
Полётный контроллер на резиновых демпферах.


В настройках прошивки (вкладка Modes) я добавил возможность отключения подсветки: режим LEDLOW - подсветка выключена когда он активен. Кроме того, перешёл с 4S батареи на 3S. 3000mAh вместо 1800mAh при том же размере - это неплохое увеличение времени полёта.
Изменения настроек iNAV
Изначально полётные режимы у меня были настроены так:
- ANGLE - для взлётов и посадок
- ANGLE + AIRMODE
- POSHOLD
- POSHOLD + ALTHOLD
В первом же полёте что-то пошло не так и POSHOLD не активировался и я получил ACRO, летать на котором на данном квадрике не так комфортно. Пообщавшись на форуме, я узнал, что многие пилоты хоть и доверяют самостоятельности режимов POSHOLD и ALTHOLD, всё равно добавляют к ним ANGLE. Я тоже добавил для перестраховки, хотя главная проблема была именно в том, что POSHOLD не хотел работать ни в какую. Осложнялась ситуация тем, что в конфигураторе и на OSD никаких ошибок не было. Более месяца ушло на поиск и устранение проблемы. Всё разрешилось, когда я психанул, поставил ПК от другого квадрика и всё как по мановению волшебной палочки начало работать. До сих пор не знаю, в чём была проблема с прежним контроллером, сейчас он стоит на 180-м квадрике и отлично там работает.
Пока разбирался с проблемой, просматривал логи специальным вьювером. В какой-то момент возник вопрос, откуда берётся дата и время, ведь на ПК нет часов. Оказывается с GPS. По этому при наличии хотя бы одного спутника будет писаться корректная дата и время, а при полном их отсутствии - что-то вроде 1.01.1970 00:00.
Когда все полётные режимы заработали и я немного полетал, выяснил, что для меня ALTHOLD намного важнее, чем POSHOLD. Исходя из этого, перенастроил режимы следующим образом:
- ANGLE - для взлётов и посадок
- ANGLE + AIRMODE
- ALTHOLD + ANGLE + AIRMODE - основной полётный режим
- ALTHOLD + POSHOLD + ANGLE + AIRMODE - режим для "повисеть"
- POSHOLD + ANGLE + AIRMODE - такое сочетание вообще не планирую использовать, сделал просто "чтобы было"
Несколько советов по режиму ALTHOLD, ибо, как показывает практика, у некоторых пилотов есть вопросы:
- не взлетайте в режиме ALTHOLD
- активизируйте режим на высоте не менее метра
- при переключении в этот режим, лучше всего просто висеть, тогда текущее положение газа будет считаться газом висения и "провалов" или "прыжков" быть не должно. Чтобы за газ висения считалось текущее положение стика газа (на момент активации режима), необходимо, чтобы переменная nav_use_midthr_for_althold имела значение OFF (это её значение по умолчанию). В противном случае, газ висения будет браться из переменной nav_mc_hover_thr
- ну и самое важное - лишний раз убедитесь, что барометр надёжно защищён от воздушных потоков и света
По режиму POSHOLD следует помнить лишь одно: если при его активации квадрокоптер начинает раскручиваться по спирали, увеличивая скорость - это "унитазинг", верный признак проблем с компасом. Чаще всего он плохо откалиброван либо его положение указано неверно. У большинства китайских плат, в том числе и наиболее популярных U-blox NEO-M8N и BN880, чип компаса стоит снизу, значит для него нужно выбирать значение FLIP. Кроме того, чип зачастую ещё и развернут. Это легко проверить в iNAV Configurator. Сейчас там нет изображения компаса, но во вкладке Setup сверху слева есть значения roll, pitch и heading. Последний - отклонение от севера. Если нос квадрокоптера направлен строго на север, отклонение составляет 0 градусов. При вращении по часовой стрелке оно должно увеличиваться, а при вращении против - уменьшаться. Желательно положить квадрокоптер носом поочерёдно в каждую из сторон света и посмотреть не "уплывает" ли он. Нормой считается отклонение менее 10 градусов. Также при повороте аппарата по осям roll и pitch, изменения heading должны быть минимальными. Хорошо настроенный компас - обязательное условие корректной работы PosHold и RTH.
В особо тяжёлых случаях такое не помогает, но, возможно, поможет размагничивание. Оно делается постоянным магнитом большой мощности. Не спеша, спиральными движениями большого радиуса сначала от периферии к центру (компасу), затем назад. Для верности повторить под разными углами. Наглядно процесс показан в этом видео.
На этом пока всё.


Знатно накомментили:
Автору - спасибо. Я себе добавил в закладки