
Сборка квадрокоптера на раме RoboCat (часть 3) - пересборка на SPRacingF3

- Часть 1 - комплектующие
- Часть 2 - сборка
- Часть 4 - установка и наcтройка iNAV
- Часть 5 - выдержки из бортового журнала
- Фотогалерея
Прошло много времени с момента написания предыдущей части и только сейчас я готов продолжить. Изначально я планировал написать одну статью по настройке ПК, где в начале кратко упомянул бы об изменениях в "железе", но ближе к финалу статья сильно раздулась, так что я разделил её на две части. В этой части только о пересборке и хардварных изменениях, а о настройке - в следующей.
Во многих аспектах, данная статья выражает субъективное мнение автора. Спорить с ним бесполезно, он упёртый.
Перерождение
Так получилось, что ПК для данного квадрокоптера я выбрал правильный, но не оптимальный. Во-первых, казалось бы ПК с барометром и компасом (10DoF) создан именно для таких случаев как у меня. Но на практике небольшой квадрокоптер имеет очень плотную компоновку, при которой провода питания различных компонентов могут давать сильные шумы и наводки на компас, что крайне нежелательно. Возникает вопрос, а для чего вообще нужны эти контроллеры? Теперь я уже не знаю. Во-вторых, когда я покупал ПК для данного квадрокоптера, Naze32 уже продавался по сниженной цене, а контроллеры на процессоре F3 уже начали своё победоносное шествие. На сегодняшний день уже F4 пришёл на смену F3. Что же до Naze32, то она необратимо устарела. Выражается это, в первую очередь, в нехватке памяти. Версия прошивки с навигацией для этого ПК очень урезана. Основной полётный функционал сохранён, но вот удобство обслуживания и "красивости" вроде светодиодной подсветки остались "за кадром". Предположу, что с выходом более новых версий прошивки ситуация будет только усугубляться.
Теория апгрейда
"Не было бы счастья, да несчастье помогло" мне с выбором полётного контроллера на замену. Под несчастьем тут подразумевается сборка другого квадрокоптера, благодаря чему у меня остался незадействованный SPRacingF3 Acro, который я и решил использовать.
Также в прошлой сборке меня сильно опечалил GPS-модуль, оказавшийся почти бутафорским. Его тоже необходимо было менять и для этого я купил рекомендуемый многими пилотами U-blox NEO-M8N с магнетометром HMC5883L. Единственное, чего мне в таком случае не хватало - барометр. Подходил любой, работающий по протоколу I2C.
Небольшое лирическое отступление. У данного ПК есть и Deluxe-версия с барометром и компасом (не путать с более поздним контроллером SPRacingF3 Evo). Для использования стороннего компаса, необходимо удалить штатный. Лично я бы с такой процедурой не справился, благо есть более простой вариант - перерезать SDA-дорожку, идущую к чипу компаса на плате ПК. Ниже фото от Алексея Станкевича, показывающее, где именно перерезать.

В связи со сменой аппаратуры, приёмник я сменил на Turnigy TGY-iA6C, а из мелочей добавил пищалку.
С проводкой и подключением сенсоров к ПК в теории было всё просто, ибо щедрая инженерная рука наделила SPRacingF3 разъёмами в достаточном количестве. Картина получилась такая: GPS подключается к UART2 (именно так мануал и советует), к I2C параллельно идут компас и барометр (шина позволяет подключить до 127 устройств одновременно), а для OSD остаются UART1 и UART3, но так как первый запараллелен с USB, я использовал UART3. Надо помнить, что UART3 выдаёт только 3,3В, в то время как Micro MinimOSD необходимо 5В. По этой причине она у меня питается от PDB, так что к ПК я подключил только провода Tx и Rx. Кстати, свободный UART1 потом можно будет использовать для подключения Bluetooth-модуля, который не конфликтует с USB. Подключение нового приёмника не отличалось от предшественника, за исключением того, что надо было подвести vbat в разъёму B-Det (чтобы получить показания заряда батареи на передатчике).
Обновлённая схема проводки выглядит так:
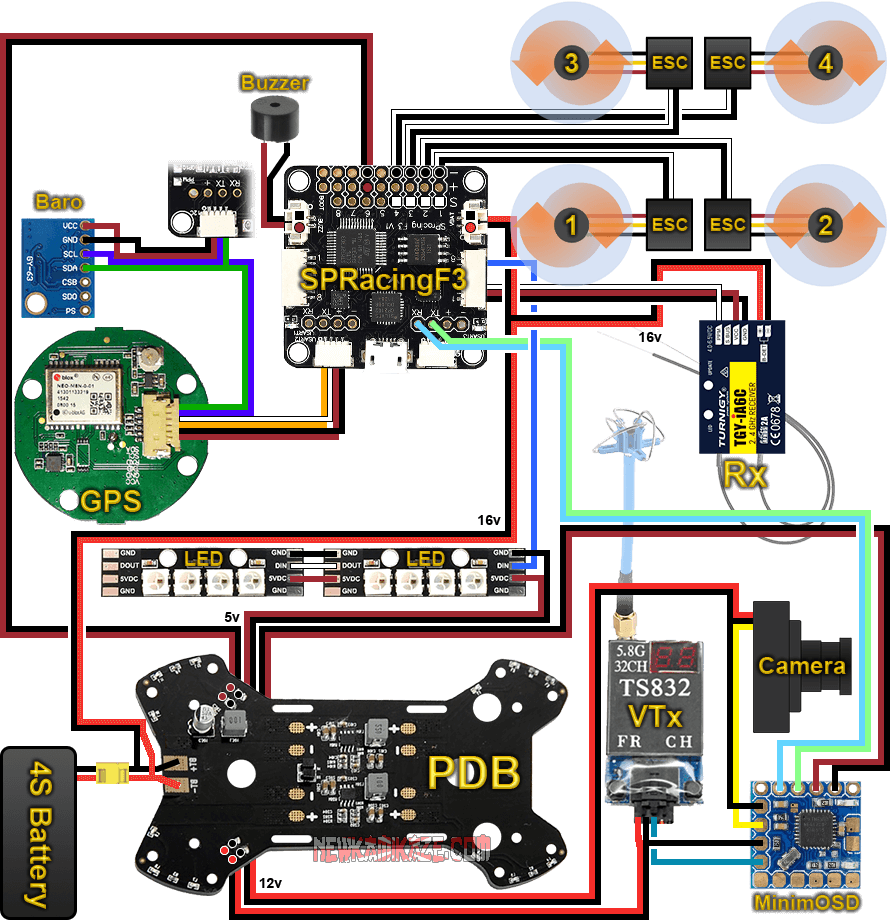
Схема проводки квадрокоптера RoboCat
А это распиновка GPS-модуля Ublox NEO-M8N:
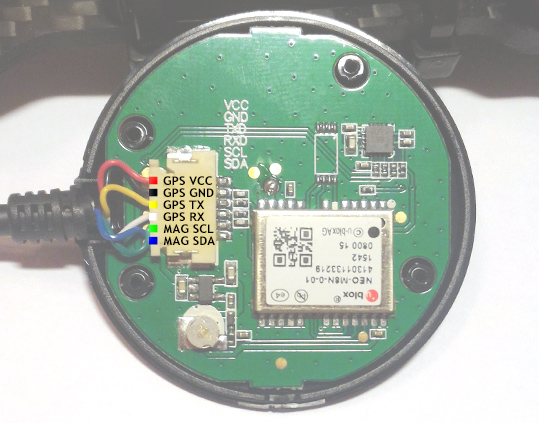
Распиновка GPS-модуля Ublox NEO-M8N
Практические проблемы
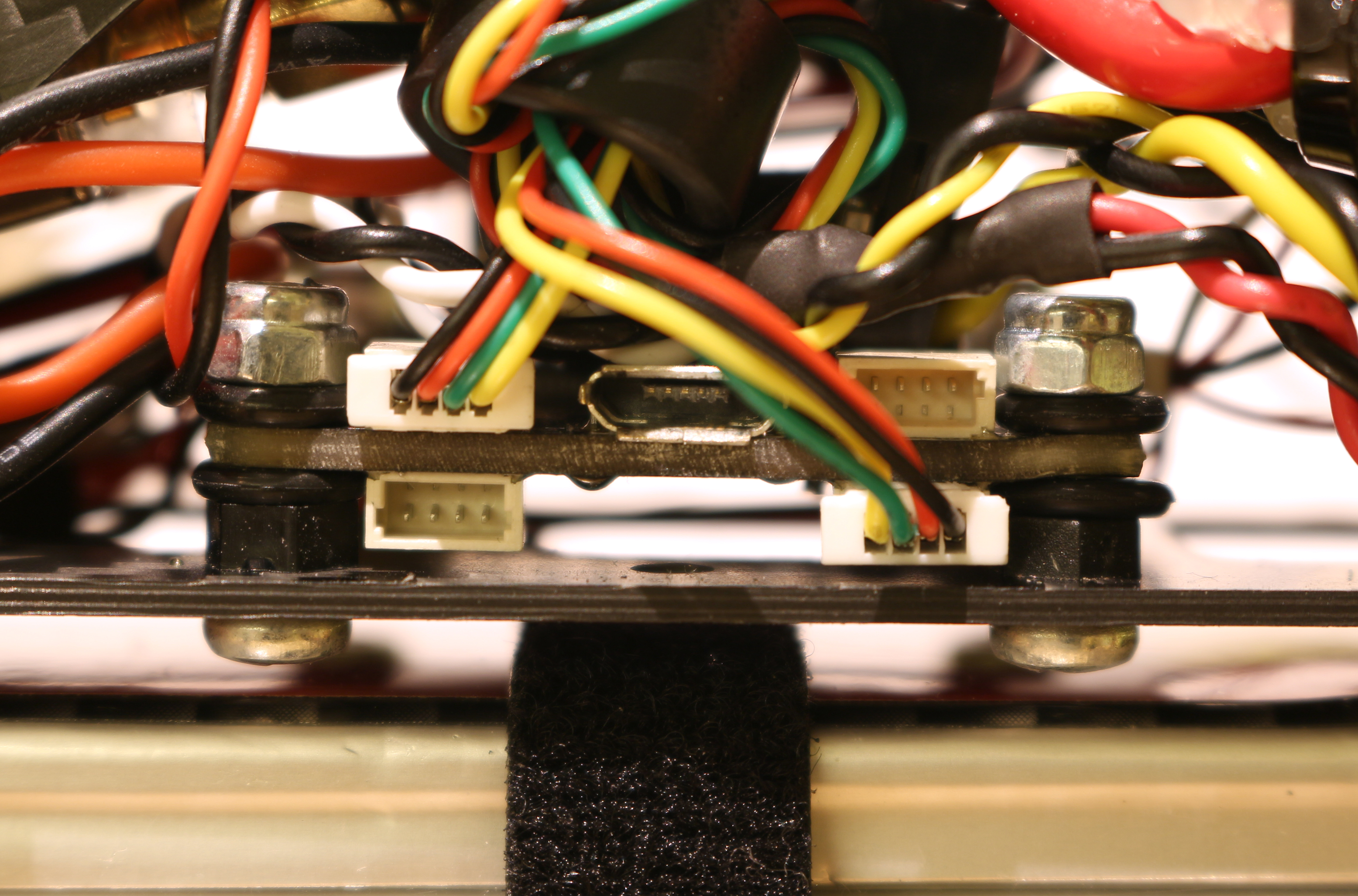
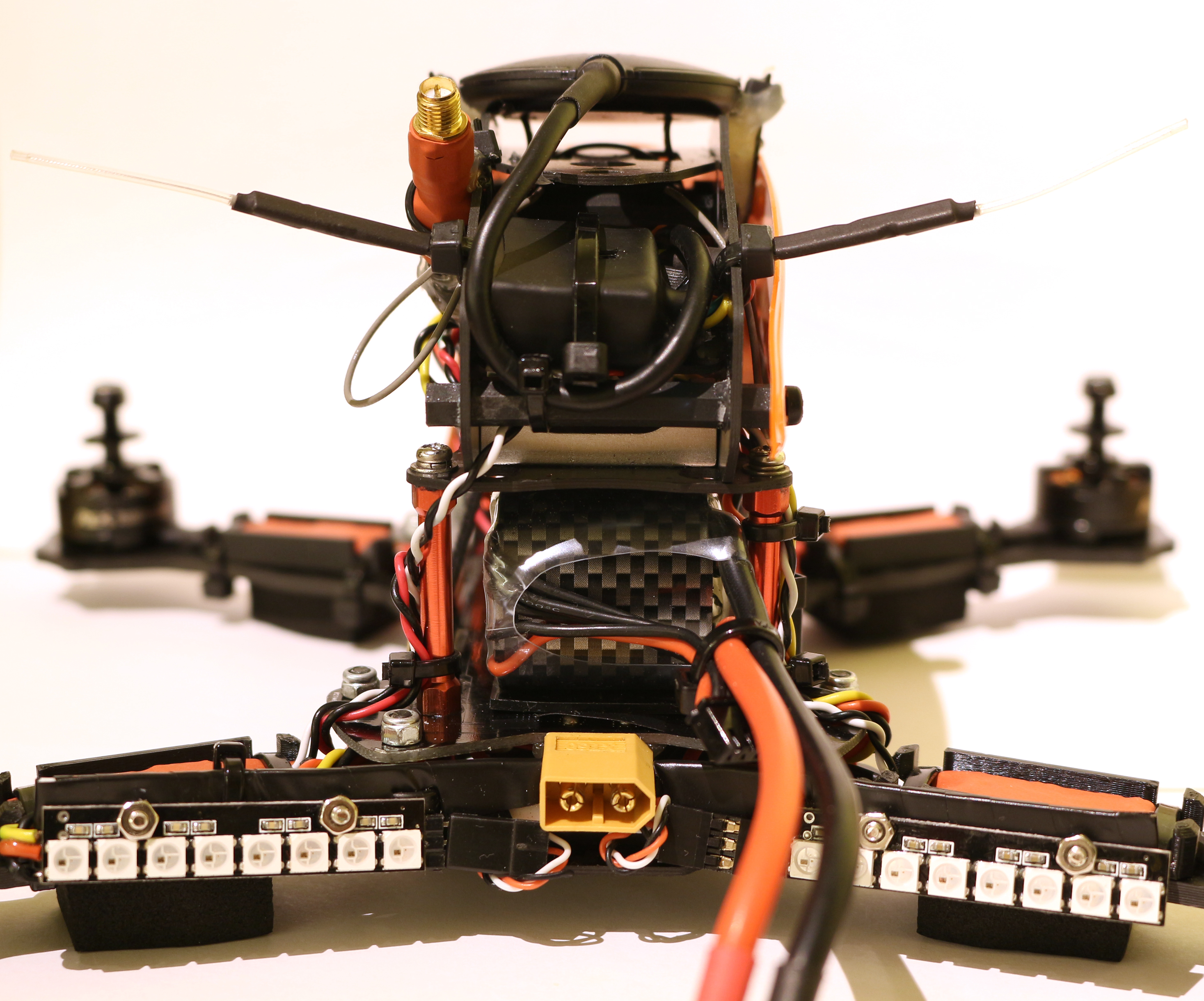
ПК я установил без корпуса, но на демпфирующих колечках, которые снизят вибрации на гироскопе и акселерометре. Кстати, теперь, благодаря иначе припаянным разъёмам, я смог развернуть ПК на 90 градусов, чтобы USB-разъём находился сбоку.
-
 Полётный контроллер SPRacingF3 на резиновых демпферах.
Полётный контроллер SPRacingF3 на резиновых демпферах.
GPS, пищалка и приёмник тоже подключились и заработали без проблем. А вот дальше приключилось то, что называется разницей между теорией и практикой. Первый барометр, который я купил - BMP280. У него есть один нюанс: для работы в режиме I2C необходимо замкнуть контакты GND и SDO. Схема его подключения к SPRacingF3 выглядит так:
SDA -> SDI
SCL -> SCK
VCC -> 5V
GND -> GND + SDO
Проблема была в том, что барометр никак не хотел работать в паре с HMC5883L. По отдельности каждый из сенсоров работал корректно, но при параллельном подключении, ПК начинал сильно тормозить и быстро зависал. До сих пор не знаю доподлинно, в чём была проблема, но есть предположения, что оба датчика использовали один и тот же адрес. Чтобы проверить это, необходима Ардуина, которой у меня нет. В итоге я купил другой барометр - GY-63 на чипе MS5611. Он заработал без проблем.
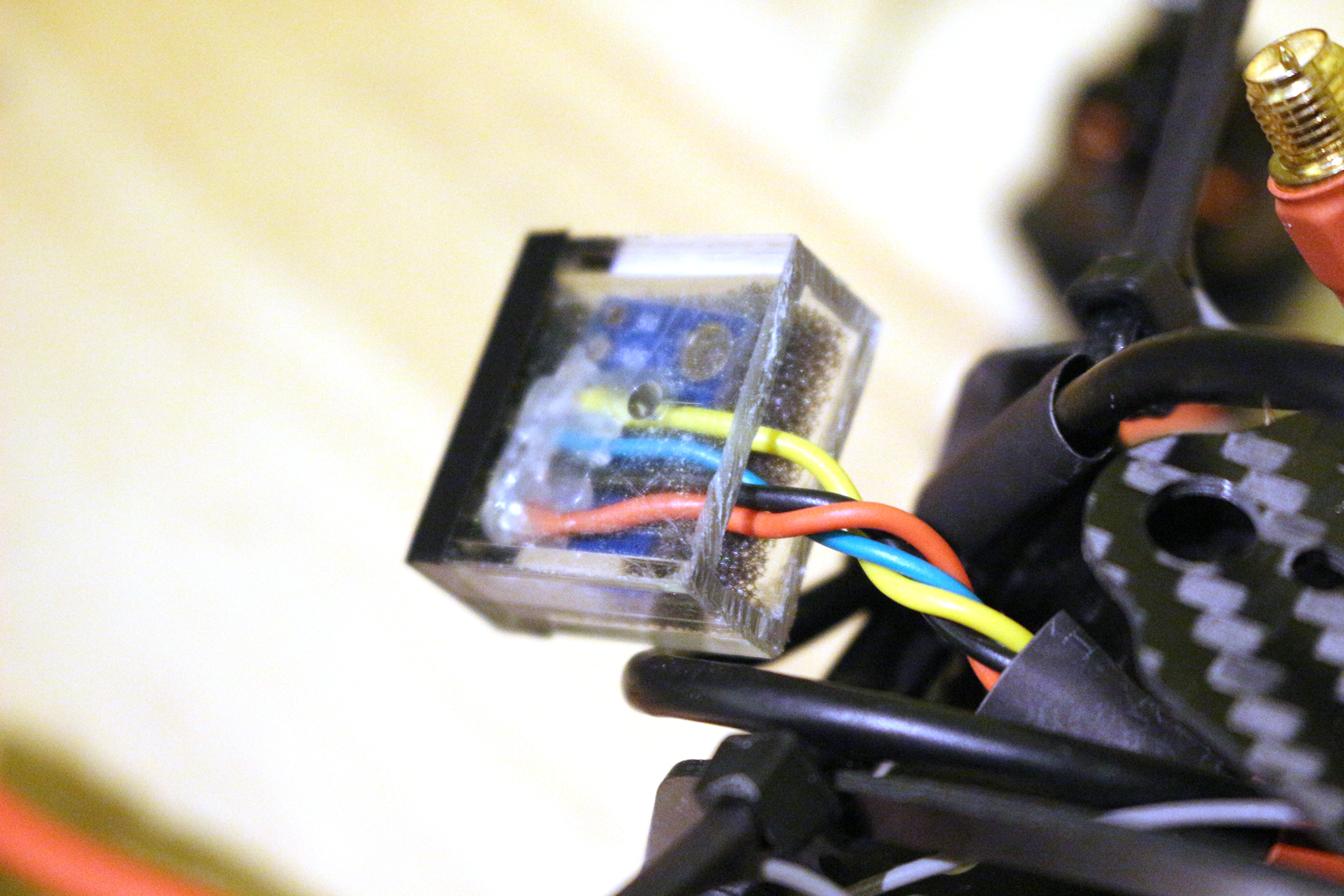
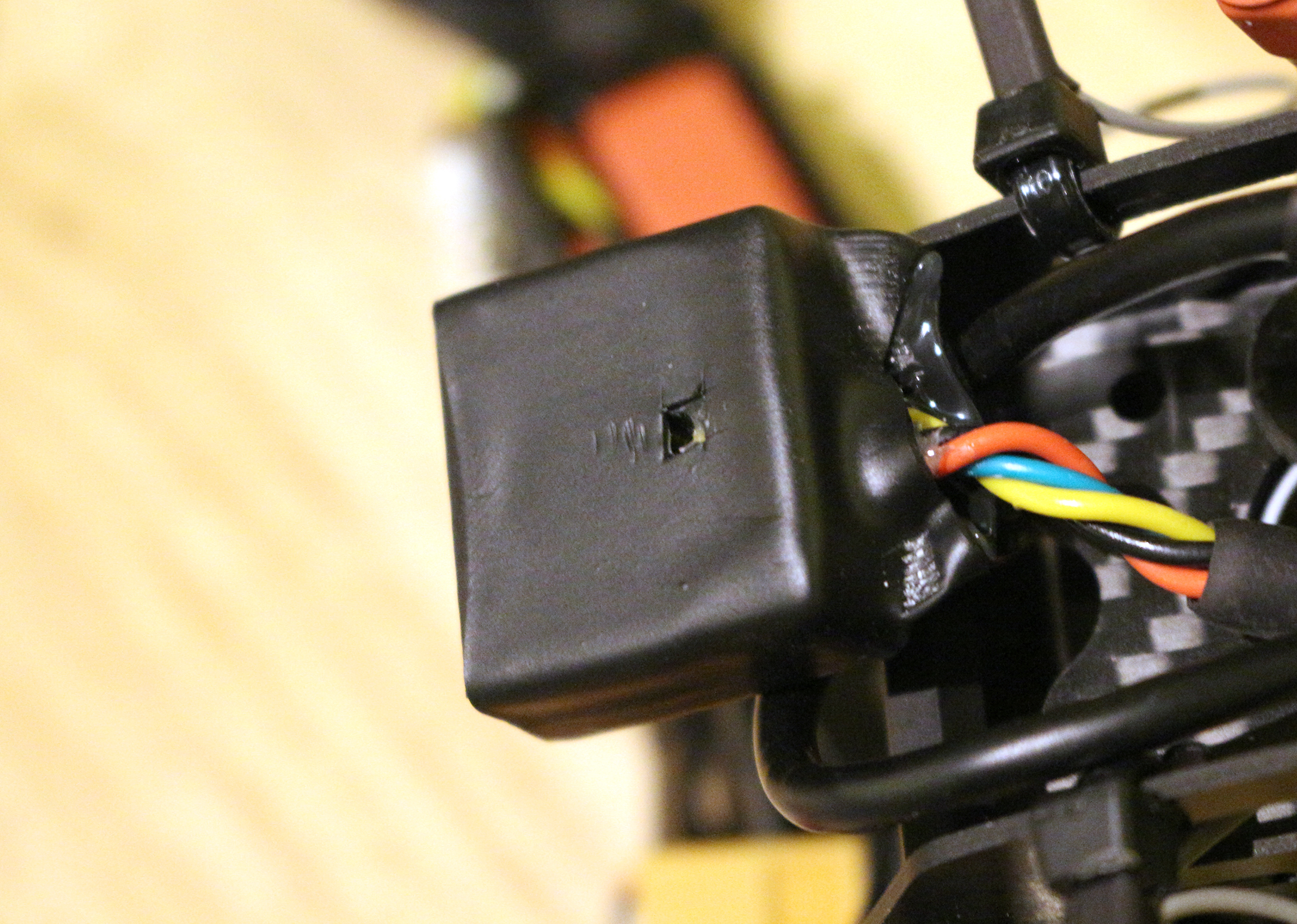
При креплении барометра надо обязательно помнить, что он должен быть защищён не только от ветра и всевозможных воздушных потоков, но и от прямых лучей солнца. Я накрыл его поролоном, засунул в пластиковую коробочку, которую заплавил в термоусадку.
-
 Корпус для барометра.
Корпус для барометра. -
 Корпус для барометра.
Корпус для барометра. -
 Барометр и GPS.
Барометр и GPS. -


На этом всё, теперь настройка и полёты.


Знатно накомментили:
Как можно с Вами связать или плиз напишите мне на мыло
vvek76@mail.ru
Не могли бы Вы помочь в подключений Sp racer3Acro+osd
В кратце есть кит набор под ZM250 пробую собрать все на раму Tarot 330A прошил все по Бетафлаю не могу взять в толк как подключить передатчик и камеру и нет коннекта к OSD menu через MSword1.6.
Спасибо