
Крах инженера Гарина
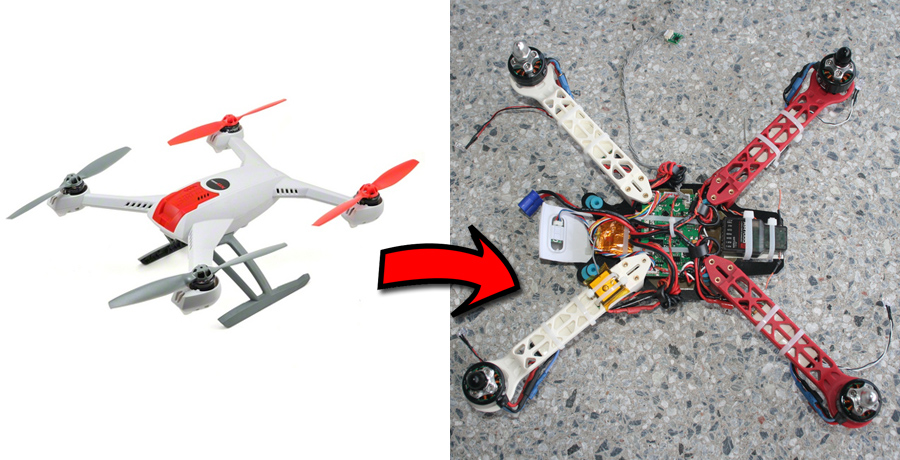
После своего квадрокоптерного падения, я сразу же начал восстановительные работы. При этом я решил не менять сломанный корпус своего Blade 350 QX, а пересадить его электронику на другую раму. Позже я напишу отдельную статью об этом, где объясню, почему я принял такое решение. Собирал всю эту конструкцию я неспеша, если в процессе выяснял, что нужно докупать какие-то детали, то я докупал, ждал их прихода и продолжал сборку. В конечном итоге мой белоснежный красавец мутировал в такого педального скакуна:
В минувшую пятницу я пришёл с работы с непоколебимым желанием "добить" сегодня свой квадрик и уже к девяти вечера я вышел на улицу чтобы совершить первый пробный взлёт. Тут надо совершить небольшое отступление и углубиться в технические подробности. Хороший квадрокоптер - штука высокотехнологичная. Конкретно мой имеет следующие датчики: GPS, гироскоп, акселерометр, электронный компас и электронный барометр. Последние три иногда нужно калибровать. Так вот, я вышел совершить пробный полёт ничего не откалибровав, хотя и головой-то понимал, что сделать это нужно. Квадрокоптер у меня быстро нашёл спутники GPS и в предвкушении я медленно начал двигать вверх стик газа. Квадрик взлетел сантиметров на 50-60 и потом резко и быстро полетел вперёд и влево от меня. Я аккуратно начал его опускать. За несколько секунд полёта он отлетел от меня примерно на 30-35 метров, после чего воткнулся в землю "ногой" шасси. Последняя не выдержала бремени ответственности и сломалась. Понимая, что "самдурак" и калибровать надо было, я пошёл домой.
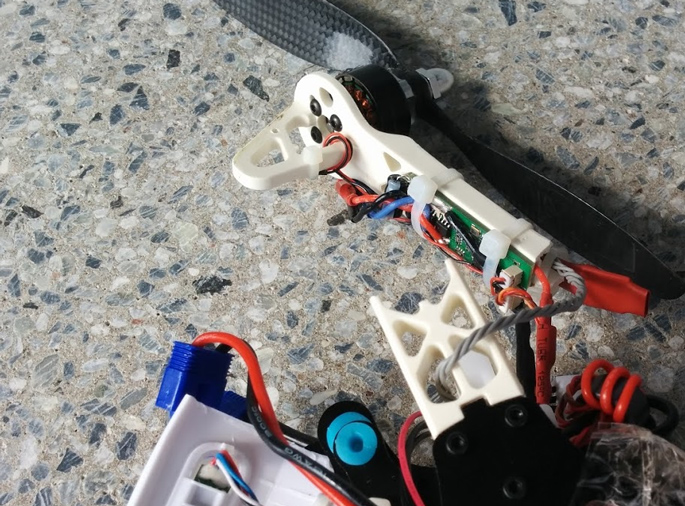
На следующий день я перекалибровал барометр и компас. Акселерометр не калибровал, так как для этого надо взлететь, а у меня с этим пока проблемы. Выявилась одна моя конструктивная ошибка: плата компаса находилась слишком близко от одного из моторов и его магнитное поле влияло на датчик. Компас я перенёс в другое место и был готов к новой попытке возлететь. Спутники GPS нашлись почти мгновенно, я взлетел опять же на 60 см и... получил полное повторение вчерашней истории и единственным отличием, что квадрокоптер понесло вперёд и вправо. Закончилось все так же, "паханием" земли, правда, на этот раз "ног" уже не было (оставшиеся три штуки я доломал сам, так как они только мешали) и я воткнулся лучом рамы, его же и поломал.
Печаль и скорбь наполнили сердце моё. А ещё безысходность, ибо я ума не приложу в чём проблема. В электронику квадрика я вообще не вмешивался, только запитал дополнительные приёмник для подвеса от неиспользуемого разъёма на главной плате. Запчасти на замену заказаны и теперь предстоит общение на англоязычных форумах, может там чего умного подскажут.



 Kaupo Kalda
Kaupo Kalda Kaupo Kalda
Kaupo Kalda








Снимок с квадрокоптера DJI Phantom Vision
октябрь 2014 г